


不变风险最小化(IRM)
声明:笔者利用AI辅助阅读论文,因此以下内容大部分由AI生成,请谨慎看待
学习完这篇论文后,笔者推荐看一下这篇文章:https://zhuanlan.zhihu.com/p/567666715
- 论文标题:Invariant Risk Minimization
- 作者:Martin Arjovsky, Léon Bottou, Ishaan Gulrajani, David Lopez-Paz
- 发表信息:International Conference on Machine Learning (ICML), 2020
- 版本与访问:arXiv:1907.02893v3 [stat.ML],DOI 链接:https://doi.org/10.48550/arXiv.1907.02893
- 官方资源:配套代码可参考原作者团队维护的 GitHub 仓库(如 facebookresearch/invariant-risk-minimization)
ps: 没有找到好的封面,借用知乎用户 @小张小张几点了 的文章图片:https://zhuanlan.zhihu.com/p/584303169,图片保留水印·
一、引言
文档第一部分 “引言” 是整个研究的 “问题提出与动机铺垫”—— 它先点出传统机器学习的核心痛点,再用直观例子具象化问题,接着分析问题根源,最后引出 “不变风险最小化(IRM)” 的设计思路和核心贡献。下面从核心问题、具象化例子、问题根源、IRM 动机、核心贡献五个维度,用通俗语言拆解:
1.1 核心痛点
核心痛点:传统机器学习“学错了东西”
传统机器学习(比如图像分类、推荐系统)的核心逻辑是 “最小化训练误差”—— 比如让模型在训练数据上尽可能少犯错。但第一部分开篇就指出:这种逻辑有个根本性缺陷 —— 数据本身带 “偏见”,模型会把这些偏见当成 “规律” 学进去。
具体来说,数据的 “偏见” 来自三个常见问题:
- 选择偏差:数据采集时的 “取样不随机”。比如要收集 “猫的图片”,结果只收集了 “白天室内的家猫”,没收集 “夜晚户外的流浪猫”;
- 混杂因素:有个隐藏变量同时影响 “输入” 和 “目标”,导致两者产生虚假关联。比如 “冰淇淋销量” 和 “溺水人数” 正相关 —— 不是因为吃冰淇淋导致溺水,而是 “高温” 这个混杂因素让两者都增加;
- 其他数据特殊性:比如设备误差(用模糊相机拍的照片)、标注偏差(标注员把 “狼” 误标成 “狗”)。
这些偏见会让模型学到 “虚假相关性”(比如 “白天室内”=“猫”),而不是 “真实规律”(比如 “猫的轮廓、耳朵形状”=“猫”)。最终的后果是:模型在训练数据上表现好,但遇到 “和训练数据不一样的新场景” 就翻车—— 这就是 “分布外泛化失败”,也是机器学习没能实现真正人工智能的关键原因。
1.2 具象化例子
用 “奶牛骆驼分类” 例子:让 “虚假关联” 看得见
为了让抽象的 “虚假关联” 更直观,文档举了一个经典的思想实验 —— 这个例子是理解后续所有内容的 “钥匙”:
1.2.1 实验设定
任务:训练模型区分 “奶牛” 和 “骆驼” 的图片。
数据问题:由于 “选择偏差”,训练数据里
- 90% 的奶牛图片拍自 “绿色牧场”;
- 90% 的骆驼图片拍自 “沙漠”。
1.2.2 模型的 “取巧操作”
当用这个数据训练卷积神经网络后,你会发现一个诡异的现象:
- 模型在训练数据上准确率很高;
- 但给它一张 “沙滩上的奶牛” 图片,模型会错判成 “骆驼”。
1.2.3 原因拆解
原来模型根本没学 “奶牛和骆驼的形状差异”(这是真实规律),而是学了 “背景颜色” 这个 “虚假关联”:
- 看到 “绿色背景” 就判为 “奶牛”;
- 看到 “米色背景” 就判为 “骆驼”。
这个例子完美体现了传统机器学习的问题:最小化训练误差让模型 “走捷径”,把 “数据偏见” 当成了 “核心规律”。
1.3 问题根源
问题根源:传统方法 “破坏了关键信息”
为什么传统方法会学错?第一部分指出了两个核心原因,都和 “数据处理方式” 有关:
1.3.1 依赖 “训练测试同分布(iid)假设”
传统机器学习有个默认前提:训练数据和测试数据是 “从同一个场景里随机抽的”(独立同分布,简称 iid)。为了满足这个假设,人们会把所有数据 “打乱后拆分” 成训练集和测试集 —— 比如把 “牧场奶牛、沙漠骆驼” 的图片打乱,再分 80% 当训练、20% 当测试。
但现实中,测试数据往往来自 “新场景”(比如沙滩奶牛),和训练数据 “不同分布”—— 这个 iid 假设本身就是 “理想情况”,和真实世界脱节。
1.3.2 “打乱数据” 毁掉了 “区分虚假 / 真实关联的线索”
文档里有个关键观点:“打乱数据” 是我们人为做的,不是自然规律。
比如原始 NIST 手写数据集(包含不同书写者、不同书写条件的数据),为了让训练测试 “同分布”,人们把数据打乱,让训练集和测试集的 “书写者比例” 一致 —— 但这样做的代价是:
- 丢失了 “不同书写者之间,哪些特征是稳定的”(比如 “数字 8 的两个圈” 是所有书写者都会有的稳定特征);
- 也丢失了 “数据来源 / 采集条件变化时,分布怎么变” 的信息(比如 “书写力度大的人,笔画更粗”)。
而这些 “丢失的信息” 恰恰是关键:只有知道 “环境变了,哪些特征不变”,才能区分 “虚假关联”(比如某个书写者的特殊笔画)和 “真实规律”(比如数字的核心结构)。
1.4 IRM动机
IRM 的核心思路:换个角度 ——“从多环境找不变性”
既然 “打乱数据” 不行,第一部分提出了一个反常识的思路:不打乱数据,反而要把训练数据按 “环境” 分开,专门学 “跨环境不变的关联”。
1.4.1 什么是 “环境”?
这里的 “环境” 不是 “自然环境”,而是 “数据的采集场景”—— 比如:
- 环境 1:A 国的牧场(80% 奶牛在绿草地,20% 在其他地方);
- 环境 2:B 国的牧场(90% 奶牛在绿草地,10% 在其他地方);
- 环境 3:沙漠边缘的农场(30% 奶牛在绿草地,70% 在沙地)。
每个环境的 “数据偏见” 不同(草地奶牛比例不同),但 “真实规律” 不变(奶牛的形状)。
1.4.2 为什么 “跨环境不变的关联” 是有用的?
文档的核心直觉是:
虚假关联会随环境变,真实关联(因果关联)会跨环境不变。
比如:
- 虚假关联(奶牛→绿草地):环境 1 里 80%,环境 2 里 90%,环境 3 里 30%—— 随环境变;
- 真实关联(奶牛→特定形状):不管哪个环境,奶牛的 “四条腿、两个角、流线型身体” 这些特征都不变 —— 跨环境稳定。
如果模型能学到 “跨所有训练环境都不变的关联”,那么这种关联大概率是 “因果关联”,能在没见过的新环境(比如沙滩奶牛)里泛化。
1.5 核心贡献
为什么之前的因果方法不行?IRM 的改进点
第一部分还提到:其实之前已有研究(比如 “不变因果预测”)尝试用因果工具解决泛化问题,但这些方法有明显缺陷,无法落地到机器学习(尤其是图像、文本等复杂数据):
- 依赖 “因果图” 假设:需要先知道 “变量之间的因果关系图”(比如 “X1→Y→X2”),但面对像素、文本等感知数据,根本画不出这样的图(你没法说 “哪个像素是哪个变量的原因”);
- 只适用于线性模型:之前的方法只能处理 “输入和输出是线性关系” 的问题,而现实中机器学习用的都是非线性模型(比如神经网络);
- 计算复杂度爆炸:变量越多,计算量呈指数增长 —— 比如处理 100 个变量,复杂度就高到无法计算。
正是因为这些缺陷,因果工具一直没能和机器学习 “无缝结合”。而 IRM 的目标就是解决这些问题:不依赖因果图、适用于非线性模型、能融入现有机器学习流程。
1.6 章节介绍
第一部分总结了整个研究的核心贡献 —— 提出 “不变风险最小化(IRM)” 这一新范式,并预告了后续章节的结构:
- IRM 的核心原则:从多个训练环境中,找到一种 “数据表示”,使得 “基于这个表示的最优分类器,在所有环境中都一样”(通俗说:不管环境怎么变,模型判断 “是不是奶牛” 的核心标准不变);
- 后续章节安排:
- 第 2 章:分析传统方法为什么无法分布外泛化;
- 第 3 章:正式推导 IRM 的数学原理和算法;
- 第 4 章:链接 IRM 与因果理论,说明 “为什么不变性能泛化”;
- 第 5 章:用实验验证 IRM 的效果;
- 第 6 章:用对话讨论未来研究方向。
1.7 小结
第一部分没有讲复杂的公式或算法,而是做了三件事:
- 提痛点:传统机器学习学错东西,因为继承了数据偏见;
- 举例子:用奶牛骆驼分类,让 “虚假关联” 和 “泛化失败” 看得见;
- 给方向:指出问题根源是 “打乱数据丢信息”,提出 “多环境找不变性” 的思路,并说明 IRM 能弥补之前因果方法的缺陷。
二、泛化的多面性
文档第二部分 “泛化的多面性” 是整个研究的 “问题诊断环节”—— 它先明确了 “分布外泛化” 的目标,再用一个具体例子拆解 “不变关联” 和 “虚假关联” 的区别,最后逐一分析传统方法为何无法解决分布外泛化,为后续提出 IRM 铺垫。下面从核心设定、关键示例、传统方法批判三个维度,用通俗语言详细拆解
2.1 核心设定
2.1.1 环境
要理解这部分,首先得抓住 “环境” 这个关键概念 —— 它是整个分析的基础,也是区别于传统机器学习的核心。
文档里的 “环境” 不是指 “自然环境”,而是数据的 “采集场景” :比如不同的测量设备、不同的拍摄地点、不同的时间、不同的实验条件(甚至是 “假设的极端场景”,比如 “关闭太阳”)。
举个实际例子:要训练 “识别猫” 的模型,“环境 1” 可能是 “白天室内拍的猫”,“环境 2” 是 “夜晚户外拍的猫”,“环境 3” 是 “用模糊手机拍的猫”—— 这三个就是不同的 “训练环境”,而 “所有环境”((E_{all}))还包括 “雨天拍的猫”“幼猫” 等没见过的场景。
2.1.2 分布外泛化的目标
传统机器学习只关心 “在和训练数据相似的测试集上表现好”(比如把同一批数据打乱分训练 / 测试),但 IRM 要解决的是 “在没见过的新环境上表现好”—— 这就是 “分布外泛化(OOD 泛化)”。
文档用数学公式定义了这个目标:
(R^{OOD}(f)=\max {e \in \mathcal{E}{all }} R^{e}(f))
通俗说就是:让预测器f在 “所有可能环境”(包括没见过的)里的 “最坏表现” 尽可能好。
其中(R^e(f))是 “预测器f在环境e下的风险(平均误差)”,比如 “在‘雨天猫’环境下,模型分类错误率是多少”。
2.2 关键示例
“线性回归示例” 看懂 “不变关联” 和 “虚假关联”
文档用 “示例 1” 把抽象的 “不变性” 具象化 —— 这是理解后续内容的关键,一定要吃透。
2.2.1 示例的 “因果结构”(谁是真因,谁是假象)
先看数据是怎么生成的(结构方程模型):
- (X_1):从 “均值 0、方差(\sigma^2)” 的高斯分布里抽(相当于 “真实原因”,比如猫的轮廓);
- Y:由(X_1)加 “均值 0、方差(\sigma^2)” 的噪声生成(Y是目标,比如 “是否是猫” 的标签,(X_1)是决定Y的核心);
- (X_2):由Y加 “均值 0、方差 1” 的噪声生成((X_2)是 “Y的结果”,相当于 “猫的背景颜色”—— 因为Y变了(X_2)才变,不是Y的原因)。
简单说:(X_1)是Y的 “因”,(X_2)是Y的 “果” ——(X_1)和Y的关联是 “因果关联”,(X_2)和Y的关联是 “虚假关联”(因为(X_2)是跟着Y走的,不是真的决定Y)。
2.2.2 不同环境下的 “关联变化”(谁不变,谁会变)
“环境变化” 体现在哪里?文档里是 “调整(\sigma^2)的值”(比如训练环境 1:(\sigma^2=10);训练环境 2:(\sigma^2=20))。我们看三种回归方式的结果:
| 回归方式 | 系数(\hat{\alpha}_1)((X_1)的权重) | 系数(\hat{\alpha}_2)((X_2)的权重) | 是否 “不变”? |
|---|---|---|---|
| 只看(X_1) | 1(不管(\sigma^2)怎么变,都是 1) | 0 | ✅ 不变 |
| 只看(X_2) | 0 | (\sigma^2/(\sigma^2+0.5))((\sigma^2)变,值就变) | ❌ 变 |
| 同时看(X_1+X_2) | (1/(\sigma^2+1))((\sigma^2)变,值变) | (\sigma^2/(\sigma^2+1))((\sigma^2)变,值变) | ❌ 变 |
关键结论:
- 只有 “只看(X_1)” 的回归是 “不变” 的 —— 不管环境怎么变((\sigma^2)怎么调),系数都不变;
- 看(X_2)的回归都是 “随环境变” 的 —— 因为(X_2)和Y的关联是 “虚假的”,环境一变,这种关联就断了。
2.2.3 为什么“不变关联” 能泛化?
文档里有个极端测试:如果让(X_2)趋近于无穷大(比如 “背景颜色” 极端夸张),会发生什么?
- 依赖(X_2)的预测器(比如只看(X_2)或看(X_1+X_2)):误差会趋近于无穷大(因为(X_2)太大,把(X_1)的作用盖过了);
- 只看(X_1)的预测器:误差始终有限(因为(X_1)是真因,不管(X_2)怎么变,(X_1)和Y的关系不变)。
这就是 “分布外泛化” 的本质:只有抓住 “不变的因果关联”,才能在没见过的极端环境里不翻车。
2.3 传统方法批评
四种传统方法的 “翻车现场”—— 为什么它们解决不了泛化?
文档接下来分析了四种主流方法,逐一指出它们的局限 —— 核心问题都是 “没抓住不变性”,要么被虚假关联带偏,要么找错了 “不变的对象”。
2.3.1 经验风险最小化(ERM):最常用,但最容易 “学错”
- 思路:把所有训练环境的数据混在一起,让模型在 “合并数据” 上的误差最小(比如把(\sigma^2=10)和(\sigma^2=20)的数组合并,学一个能拟合所有数据的回归)。
- 翻车原因:合并数据后,(X_2)和Y的虚假关联依然很强(比如(\sigma^2)大时,(X_2)和Y的相关性更高),ERM 会给(X_2)分配很大的权重 —— 结果就是 “在训练环境里误差小,但换个环境(比如(\sigma^2=1000))就失效”。
- 通俗类比:相当于学生把所有练习题混在一起背答案,没理解知识点,换个题型就不会了。
2.3.2 鲁棒学习:看似 “防极端”,实则和 ERM 没区别
- 思路:不追求 “平均误差小”,而是 “在最坏环境下的误差最小”(比如让 “(\sigma^2=10)” 和 “(\sigma^2=20)” 里的最大误差尽可能小),还会加 “环境基准值(r_e)”(比如用Y的方差当基准,避免噪声大的环境影响)。
- 翻车原因:文档用 “命题 2” 证明了一个关键结论 ——鲁棒学习本质上还是 “加权平均误差最小化”(只是给不同环境的误差加了不同权重,比如给噪声小的环境加更大权重)。 这意味着它和 ERM 一样,还是会依赖(X_2)的虚假关联 —— 比如如果两个训练环境的(\sigma^2)都大,鲁棒学习依然会给(X_2)大权重,到(\sigma^2)小的新环境就翻车。
2.3.3 领域自适应:匹配 “特征分布”,但找错了 “不变对象”
- 思路:学一个数据表示(\Phi)(比如把(X_1、X_2)转成新特征),让 “不同环境下(\Phi)的分布一致”(比如让(\sigma^2=10)和(\sigma^2=20)的(\Phi(X))分布一样),再在(\Phi)上训练分类器。
- 翻车原因:它找的 “不变” 是 “特征分布不变”,但真实的 “不变关联” 是 “(X_1)和Y的关系不变”—— 而(X_1)的分布本身是随环境变的((\sigma^2)变了,(X_1)的方差就变了)。 比如 “猫的轮廓((X_1))在白天和夜晚的分布不一样(白天清晰,夜晚模糊)”,领域自适应要强行让 “轮廓的分布一致”,反而会破坏真正的不变性。
2.3.4 不变因果预测(ICP):匹配 “残差分布”,但条件太苛刻
- 思路:找一个变量子集(比如只选(X_1)),让 “基于这个子集的回归残差(预测值和真实Y的差)在所有环境下分布一致”—— 认为这样的子集就是 “因果变量”。
- 翻车原因:它要求 “残差分布不变”,但在示例 1 里,Y的噪声方差是随环境变的((\sigma^2)变了,Y的噪声就变了),导致残差分布也会变 ——ICP 因此无法识别出(X_1)是真因,反而可能把(X_1)排除在外。 简单说:ICP 的 “残差分布不变” 条件太严格,现实中很多场景(比如噪声变化)都满足不了。
2.4 小结
第二部分的核心结论:传统方法的 “共性问题”
这四种方法看似思路不同,但都没解决分布外泛化的核心 ——没能力区分 “不变的因果关联” 和 “随环境变的虚假关联”:
- ERM 和鲁棒学习:只关心 “拟合训练数据”,不管关联是不是因果的;
- 领域自适应:关心 “特征分布不变”,但 “分布不变” 不等于 “关联不变”;
- ICP:关心 “残差分布不变”,但条件太苛刻,无法应对噪声变化等现实情况。
正是因为传统方法都有这个缺陷,文档才要提出 IRM—— 一个专门 “找不变因果关联” 的新范式。
三、不变风险最小化的算法
文档第三部分 “不变风险最小化的算法” 是整个研究的 “技术核心”—— 它从数学定义出发,先明确 “不变性” 的严格标准,再拆解 “理想 IRM 优化问题” 的难点,最后通过一系列简化和改进,推导出可落地的实用算法(IRMv1)。这部分本质是 “把第一部分的直觉、第二部分的问题,转化为可计算的数学公式和代码逻辑”。
下面从核心定义、理想优化问题、优化难点与解决方案、实用算法(IRMv1)、实现细节与局限性五个维度,用 “直觉 + 公式 + 例子” 的方式拆解,避免陷入纯数学推导的晦涩。
3.1 核心定义
3.1.1 什么是 “能引出不变预测器的数据表示”?
要设计算法,首先得明确 “目标”—— 到底什么样的数据表示(比如提取 “动物形状” 的特征),才算 “好的、能带来不变性的表示”?文档用 “定义 3” 给出了严格答案,这是整个 IRM 算法的基石。
定义 3 的通俗解读
定义 3:若存在一个分类器w(比如 “看形状判断是否是奶牛” 的规则),使得:
- 对所有训练环境e(牧场、沙滩、沙漠),这个w都是 “基于数据表示(\Phi)的最优分类器”(即没有其他分类器能在(\Phi)上比w的误差更小); 则称 “数据表示(\Phi)能引出跨环境的不变预测器(w \circ \Phi)”((w \circ \Phi)就是 “用(\Phi)提特征、用w做分类” 的完整预测器)。
3.1.2 为什么定义3等价于 “不变关联”?
结合第二部分的 “条件期望” 直觉:对均方误差(回归)、交叉熵(分类)等常见损失,“最优分类器” 本质是 “条件期望(\mathbb{E}[Y|X])”(比如 “看到‘四条腿 + 两个角’的特征,预测是奶牛的概率”)。
因此,定义 3 等价于:对所有环境e和(e'),只要特征(\Phi(X^e)=h)(比如 “形状特征是 h”),就有(\mathbb{E}[Y^e|\Phi(X^e)=h] = \mathbb{E}[Y^{e'}|\Phi(X^{e'})=h])。
通俗说:相同的特征h,在任何环境下对应 “目标Y的期望” 都一样—— 这正是 “不变关联” 的本质(比如 “‘四条腿 + 两个角’的特征,不管在牧场还是沙滩,对应‘是奶牛’的概率都一样”)。
3.1.3 科学类比:让算法像科学家一样找规律
文档举了个很形象的例子:牛顿发现 “苹果落地” 和 “行星运动” 服从同一引力公式 —— 这就是 “用正确的变量(质量、距离)描述现象,规律跨场景不变”。IRM 的目标正是让模型做类似的事:找到 “能让预测规则跨环境不变的数据表示”,就像科学家找到 “能让物理定律跨场景不变的变量”。
3.2 理想的 IRM 优化问题:双层优化的 “困境”
明确目标后,文档把 “找不变表示” 转化为一个数学优化问题 —— 但这个 “理想问题” 存在致命难点,无法直接计算,这也是后续改进的出发点。
3.2.1 理想 IRM 的数学表达
我们需要同时优化两个东西:
- 数据表示(\Phi)(比如提取 “形状” 的特征提取器);
- 分类器w(比如基于形状判断的规则); 目标是:
- 最小化所有训练环境的误差和(保证预测准);
- 满足约束:w是所有环境下 “基于(\Phi)的最优分类器”(保证不变性)。
公式写出来是这样的(双层优化):(\begin{array}{rlrl} \min {\substack{\Phi :\mathcal{X}\to \mathcal{H} \ w: \mathcal{H} \to \mathcal{Y}}} & \sum {e\in \mathcal{E}{tr}}R^e(w\circ \Phi ) \ \text{subject to} & w\in \underset{\overline{w}:\mathcal{H}\to \mathcal{Y}}{\arg \min }R^e(\overline{w}\circ \Phi ), \forall e \in \mathcal{E}{tr}. \end{array})
3.2.2 为什么这个问题 “难”?—— 双层优化的痛点
“约束条件” 是关键:对每个环境e,都要先解一个 “内层优化”(找(\overline{w})使得(R^e(\overline{w}\circ \Phi))最小),再做 “外层优化”(调(\Phi)和w)。 举个例子:如果有 10 个训练环境,每次更新(\Phi)后,都要给 10 个环境各跑一次 “找最优(\overline{w})” 的流程 —— 计算量极大,而且内层优化的 “不稳定性”(比如局部最优)会传递到外层,导致整个优化过程难以收敛。
核心矛盾:理想的 IRM 能严格保证不变性,但计算上 “不可行”;必须做简化,在 “可计算” 和 “不变性” 之间找平衡。
3.3 优化难点与解决方案
破局:从 “理想” 到 “实用” 的三步简化,文档通过 “三步改进”,把不可行的双层优化,转化为可落地的 IRMv1 算法。每一步都在解决一个具体问题,逻辑链非常清晰。
3.3.1 第一步:把 “硬约束” 变成 “软惩罚”—— 解决 “约束难满足” 问题
硬约束(“w必须是所有环境的最优分类器”)太严格,我们换个思路:不强制满足约束,而是把 “违反约束的程度” 变成一个 “惩罚项”,加到损失里—— 违反越严重,惩罚越大,倒逼模型接近约束。
具体做法是构造新的损失函数:(L_{IRM}(\Phi ,w)=\sum {e\in \mathcal{E}{tr}}R^e(w\circ \Phi )+\lambda \cdot \mathbb{D}(w,\Phi ,e)) 其中:
- 第一项(\sum R^e(\cdot)):还是 “所有环境的误差和”(保证预测准);
- 第二项(\lambda \cdot \mathbb{D}(\cdot)):惩罚项,(\mathbb{D}(w,\Phi,e))衡量 “分类器w离‘环境e的最优分类器’有多远”,(\lambda)是 “平衡预测准度和不变性” 的超参数((\lambda)越大,越看重不变性);
- 关键要求:(\mathbb{D}(\cdot))必须对(\Phi)和w可微 —— 这样才能用梯度下降优化(神经网络的核心优化方式)。
3.3.2 第二步:选对 “惩罚项(\mathbb)”—— 解决 “数值不稳定” 问题
惩罚项(\mathbb{D})的设计是关键:选得不好,优化会出大问题。文档对比了两种惩罚项,最终选了能稳定优化的(\mathbb{D}_{lin})。
1. 不好的选择:(\mathbb_)(直接算分类器距离)
思路:(\mathbb{D}{dist}(w,\Phi,e) = |w - w\Phi^e|^2),其中(w_\Phi^e)是 “环境e下基于(\Phi)的最优分类器”(比如用线性回归的正规方程1算出来的系数)。 问题:不连续、数值爆炸(看文档图 1 的蓝色曲线)。 举个例子(用第二部分的示例 1):
- 当数据表示(\Phi)依赖(X_2)的权重c趋近于 0(接近理想不变表示)时,(w_\Phi^e)的(X_2)系数会趋于无穷大 —— 导致(|w - w_\Phi^e|^2)突然跳变(不连续),梯度下降没法收敛到(c=0);
- 当c趋近于无穷大(完全依赖(X_2))时,惩罚项反而趋近于 0—— 模型会被误导去学虚假关联。
2. 好的选择:(\mathbb_)(算 “违反正规方程的程度”)
思路:绕开 “直接求(w_\Phi^e)”(避免矩阵求逆和数值爆炸),利用 “线性分类器的最优条件”—— 对线性最小二乘,最优分类器(w_\Phi^e)满足 “正规方程”:(\mathbb{E}[\Phi(X^e)\Phi(X^e)^\top] w_\Phi^e = \mathbb{E}[\Phi(X^e)Y^e]) 因此,“w是不是最优”,等价于 “w是否满足这个方程”—— 违反方程的程度,就是惩罚项:(\mathbb{D}_{lin}(w,\Phi,e) = \left| \mathbb{E}[\Phi(X^e)\Phi(X^e)^\top] w - \mathbb{E}[\Phi(X^e)Y^e] \right|^2)
优势(看文档图 1 的绿色曲线):
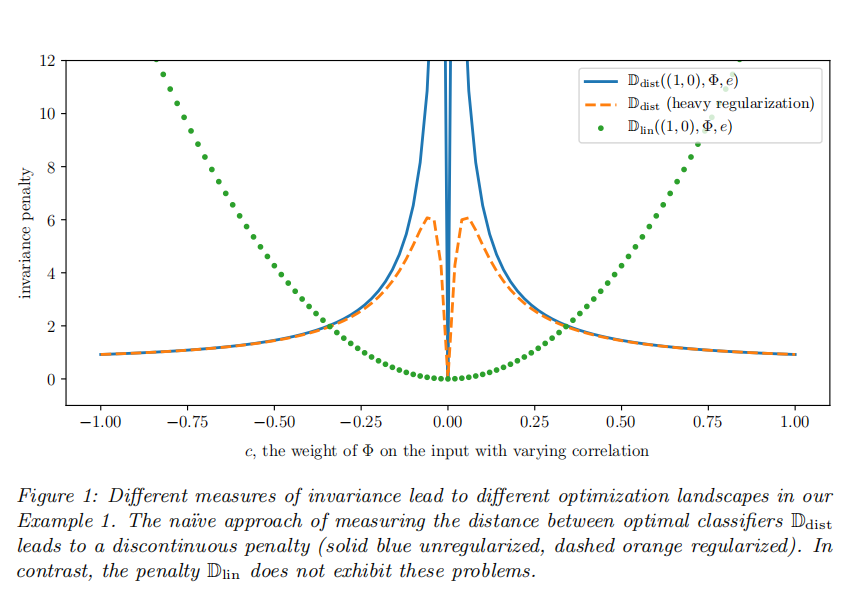
- 光滑连续:是(\Phi)和w的多项式函数,没有跳变,梯度下降能稳定优化;
- 目标明确:在 “理想不变表示”(比如(c=0))处达到最小值 0,不会被虚假关联误导;
- 等价性:(\mathbb{D}_{lin}=0)当且仅当w是环境e的最优分类器 —— 严格对应定义 3 的约束。
3.3.3 第三步:固定分类器w—— 解决 “参数冗余” 问题
即便用了(\mathbb{D}{lin}),优化((\Phi, w))仍有一个问题:参数过度冗余。比如:对任意非零常数(\gamma),“(\Phi' = \gamma \Phi)、(w' = w/\gamma)” 的预测结果和原来一样((w' \circ \Phi' = w \circ \Phi)),但惩罚项(\mathbb{D}{lin})会随(\gamma)变化 —— 导致模型可以通过 “缩放(\gamma)” 让惩罚项趋近于 0,却不提升真实泛化能力2。
解决方案:固定分类器w为一个已知值,只优化数据表示(\Phi)。 文档进一步证明:固定w为标量 1.0 就足够了(不用复杂的向量),这是整个简化中最巧妙的一步。
3.3.4 为什么 “标量(w=1.0)” 就够了?(定理 4 的直觉)
定理 4 用线性代数证明了一个关键结论:任何线性不变预测器,都能分解成 “秩 1 的数据表示(\Phi)” 和 “标量分类器(w=1.0)”3。 通俗说:比如 “最优不变预测器是(Y=1 \cdot X_1 + 0 \cdot X_2)”,我们可以把它拆成:
- 数据表示(\Phi(X) = X_1)(只提取(X_1)的特征,秩 1);
- 分类器(w=1.0)(直接用(\Phi(X))作为预测结果); 两者的组合就是(w \cdot \Phi(X) = 1 \cdot X_1),和原预测器完全等价。
这意味着:我们不用再优化w,只需优化(\Phi),让 “(1.0 \cdot \Phi(X))” 成为跨环境的不变预测器 —— 参数冗余问题彻底解决。
3.4 实用算法(IRMv1)
经过以上三步简化,理想的 IRM 终于变成了可计算的 “IRMv1”,这也是实际代码中用的版本。
IRMv1 的目标函数
(\min {\Phi: \mathcal{X} \to \mathcal{Y}} \sum{e \in \mathcal{E}{tr}} R^e(\Phi)+\lambda \cdot\left| \nabla{w | w=1.0} R^e(w \cdot \Phi)\right| ^{2})
每个部分的含义:
- (\Phi):不再只是 “特征提取器”,而是 “完整的不变预测器”(因为(w=1.0)固定,(\Phi(X))直接输出预测结果);
- 第一项(\sum R^e(\Phi)):经验风险项 —— 保证(\Phi)在所有训练环境中预测准(比如 “用(\Phi)判断奶牛,在牧场和沙滩环境中误差都小”);
- 第二项(\lambda \cdot |\nabla_{w=1.0} R^e(w \cdot \Phi)|^2):不变性惩罚项
- (\nabla_{w=1.0} R^e(w \cdot \Phi)):“当(w=1.0)时,风险(R^e)对w的梯度”;
- 对线性损失(如均方误差),这个梯度正好对应(\mathbb{D}_{lin})的核心部分(违反正规方程的程度);
- 对非线性损失(如交叉熵),它衡量 “(w=1.0)离‘基于(\Phi)的最优分类器’有多远”—— 梯度越小,(w=1.0)越接近最优,不变性越强;
- (\lambda):平衡项 ——(\lambda)太小,模型会像 ERM 一样学虚假关联;(\lambda)太大,模型会牺牲预测准度来保不变性(可能变成 “什么都不预测的零模型”)。
3.5 实现细节
理论再好,落地还要考虑 “怎么用神经网络的小批量数据估算目标函数”—— 文档给出了关键技巧:
对不变性惩罚项中的 “梯度范数平方”,用两个独立的小批量(来自同一环境e)做无偏估计:(\sum_{k=1}^{b}\left[\nabla_{w=1.0} \ell\left(w \cdot \Phi(X_k^{e,i}), Y_k^{e,i}\right) \cdot \nabla_{w=1.0} \ell\left(w \cdot \Phi(X_k^{e,j}), Y_k^{e,j}\right)\right])
为什么用两个小批量4?
- 单个小批量估算梯度会有偏差(因为(\mathbb{E}[a^2] \neq (\mathbb{E}[a])^2));
- 用两个独立小批量的梯度乘积求和,能无偏估计 “梯度范数的期望”—— 保证训练过程稳定(具体可看附录 D 的 PyTorch 代码,核心就是用两个 batch 算梯度再相乘)。
3.6 局限性和未来方向:线性w的潜在问题
文档没有回避算法的局限性,明确指出 “假设w是线性的” 可能存在的问题:
- 是否会漏掉非线性不变性? 比如 “真实的不变预测器是(Y=\Phi(X)^2)”,而 IRMv1 强制(Y=1.0 \cdot \Phi(X))—— 理论上可能抓不到这种非线性关系。 但文档认为:若(\Phi)足够灵活(比如用深度神经网络),(\Phi(X))本身可以学习到 “非线性特征”(比如(\Phi(X) = X^2)),此时线性(w=1.0)仍能等价于非线性预测器5。
- 零表示的陷阱 若(\Phi(X)=0)(什么特征都不提取),则对任何w,(w \cdot \Phi(X)=0)—— 此时惩罚项为 0,但预测能力为零。不过这种情况会被 “经验风险项” 剔除(因为预测误差太大)。
- 未来研究方向
- 如何设计 “非线性分类器w” 的不变性惩罚项?
- 有没有 “既不被 ERM 剔除、也不被不变性项剔除” 的非不变预测器?
- 更大的w假设类(比如神经网络)能否用更少的环境找到不变性?
3.7 小结
第三部分的核心 ——“把直觉落地”
第三部分的逻辑链非常清晰:
- 定目标:用定义 3 明确 “好的不变表示” 是什么;
- 提理想:写出双层优化问题,但发现计算不可行;
- 解难题:三步简化(硬约束→软惩罚、选(\mathbb{D}_{lin})、固定(w=1.0)),解决 “计算难、数值差、参数冗余” 问题;
- 出算法:得到 IRMv1,给出实现细节;
- 谈局限:不回避线性w的问题,指出未来方向。
它完成了从 “第一部分的直觉” 到 “可代码实现的算法” 的跨越 —— 是整个研究 “从理论到实践” 的关键桥梁。
四、不变性、因果性与泛化
文档第四部分 “不变性、因果性与泛化” 是整个研究的 “理论根基”—— 它不再聚焦算法设计,而是回答三个核心问题:1. 为什么 IRM 学习的 “跨训练环境不变性” 能泛化到所有环境?2. 不变性和因果性到底是什么关系?3. IRM 的泛化能力有数学理论支撑吗? 这部分把 IRM 从 “工程算法” 提升到 “因果泛化理论” 的层面,下面用 “因果基础→泛化理论→非线性与环境数量→因果即不变性” 的逻辑,结合例子拆解,避免陷入纯理论晦涩。
4.1 结构方程模型(SEM)与干预
先补因果基础:结构方程模型(SEM)与干预 —— 理解 “环境” 的本质
要理解 IRM 的泛化能力,必须先明确 “环境差异的来源”—— 文档用 “结构方程模型(SEM)” 和 “干预” 定义环境,这是连接 “不变性” 与 “因果性” 的关键。
1. 什么是结构方程模型(SEM)?—— 数据的 “因果生成规则”
SEM 是描述 “变量间因果关系” 的数学框架,比如文档示例 1 的因果关系可以写成 SEM:
(\begin{align*} X_1 &\leftarrow \mathcal{N}(0, \sigma^2) \quad \text{(X1是“因”,无父变量,由噪声生成)} \ Y &\leftarrow X_1 + \mathcal{N}(0, \sigma^2) \quad \text{(Y的“因”是X1,加噪声)} \ X_2 &\leftarrow Y + \mathcal{N}(0, 1) \quad \text{(X2的“因”是Y,加噪声)} \end{align*})
- 因果图:SEM 对应一张无环图(DAG)—— 节点是变量(X1,Y,X2),箭头从 “因” 指向 “果”(X1→Y→X2);
- 核心特点:每个变量的取值由 “父变量(直接原因)+ 独立噪声” 决定,噪声代表 “未被观测的随机因素”。
简单说,SEM 就是 “数据生成的因果配方”—— 知道了 SEM,就能生成任何环境下的数据;而 “环境差异” 本质是 “SEM 的干预”。
2. 什么是 “干预”?—— 环境变化的数学描述
“干预” 是改变 SEM 的某一部分,生成新环境的操作,比如:
- 干预 X2:把 X2 的生成规则从 “X2←Y + 噪声” 改成 “X2←1000”(强制 X2 为常数),得到新环境 e1;
- 干预 Y 的噪声:把 Y 的噪声方差从(\sigma^2)改成(2\sigma^2),得到新环境 e2;
- 干预 X1:把 X1 的生成规则从 “(\mathcal{N}(0, \sigma^2))” 改成 “(\mathcal{N}(5, \sigma^2))”(X1 均值偏移),得到新环境 e3。
文档用 “定义 6” 严格定义干预:干预后得到 “干预 SEM((C^e))”,对应的数据集服从 “干预分布((P(X^e,Y^e)))”——每个环境本质是 “一次干预后的 SEM”,而 “所有环境((E_{all}))” 就是 “所有有效干预的集合”。
3. 什么是 “有效干预”?—— 保证预测任务有意义
不是所有干预都能算 “有效环境”,比如把 Y 的生成规则改成 “Y←随机噪声”(与 X 无关),此时预测 Y 变得不可能。文档 “定义 7” 明确有效干预需满足 3 个条件:
- 因果图仍无环(干预不破坏因果关系的逻辑);
- Y的条件期望不变:(\mathbb{E}[Y^e | Pa(Y)] = \mathbb{E}[Y | Pa(Y)])((Pa(Y))是 Y 的父变量,比如示例 1 中 Y 的父变量是 X1—— 这保证 “Y 与父变量的因果关系不变”,是预测的基础);
- Y的条件方差有限:(\mathbb{V}[Y^e | Pa(Y)])在有限范围(避免噪声过大导致信号淹没)。
简单说,有效干预只能 “改变非因果变量(如 X2)或噪声”,不能 “破坏 Y 与真实原因(如 X1)的关系”—— 这是 IRM 能泛化的前提:所有环境共享 “Y 的因果生成规则”,只是表面的非因果因素不同。
4.2 IRM泛化的核心理论
RM 泛化的核心理论:从 “训练环境不变性” 到 “所有环境泛化”
IRM 的目标是 “泛化到所有环境((E_{all}))”,但训练时只能用到 “部分训练环境((E_{tr}))”—— 文档通过两步推导,证明 “只要训练环境足够多样,IRM 学习的不变性就能迁移到所有环境”。
1. 第一步:不变性 + 低训练误差 → 低泛化误差
假设模型在训练环境中满足两个条件:
- 条件 1:低训练误差((\sum_{e \in E_{tr}} R^e(\Phi) \approx 0));
- 条件 2:跨训练环境不变((w=1.0)在所有(E_{tr})中都是最优分类器)。
由于 “有效干预不改变 Y 与父变量的因果关系”,而 IRM 学习的 “不变性” 正是 “Y 与父变量的因果关联”(如示例 1 中的 X1→Y),因此:
- 这个因果关联在所有环境((E_{all}))中都成立;
- 模型在训练环境中已学好这个关联且误差低,因此在所有环境中误差也会低 —— 这就是 “分布外泛化” 的直观逻辑。
数学上,这一步可通过 “泛化误差界” 证明:一旦模型学到 “跨环境不变的因果关联”,其泛化误差会被 “训练误差 + 不变性惩罚项” 的上界控制,不会随环境变化而爆炸。
2. 第二步:训练环境 “足够多样” → 不变性迁移到所有环境
关键问题:如何保证 “训练环境的不变性” 就是 “所有环境的不变性”?—— 文档用 “线性一般位置假设” 和 “定理 9” 回答,核心是 “训练环境的多样性足够,能排除所有虚假不变性”。
(1)什么是 “线性一般位置假设”?—— 训练环境的 “多样性标准”
“线性一般位置” 是数学上的 “多样性条件”,通俗说就是:训练环境不能太相似(不能存在线性依赖),每个新环境都能提供 “新的信息”,帮助排除虚假不变性。
比如示例 1 中,若训练环境只有 “(\sigma^2=10)” 这一个,模型可能误以为 “X2 与 Y 的关联(虚假)” 是不变的;但如果有 “(\sigma^2=10)” 和 “(\sigma^2=20)” 两个环境,模型会发现 “X2 的系数随(\sigma^2)变化(虚假),X1 的系数不变(真实)”—— 这就是 “多样性” 的作用。
文档 “假设 8” 用线性代数严格定义这一条件:训练环境的数量和分布需满足 “对任意非零向量 x,环境间的‘特征协方差 - 目标协方差’向量张成的空间维度足够大”—— 本质是 “环境差异能覆盖‘虚假关联的变化范围’,让模型无法通过虚假关联拟合所有训练环境”。
(2)定理 9:多样性足够 → 不变性迁移
定理 9 是第四部分的核心,通俗结论是:
若训练环境满足 “线性一般位置”,且模型在这些环境中学习到 “秩为 r 的不变表示(\Phi)”,则这个(\Phi)在所有环境中都是不变的。
- 秩 r:表示(\Phi)提取的 “不变特征的维度”(如 r=1 表示只提取 X1 这一个不变特征);
- 核心逻辑:如果训练环境足够多样,任何 “虚假不变性”(如 X2 与 Y 的关联)都会在某个训练环境中 “暴露变化”,被 IRM 的惩罚项排除;只有 “真实因果不变性”(如 X1 与 Y 的关联)能在所有训练环境中稳定,最终被模型学到。
比如示例 1 中,只要有 2 个满足一般位置的训练环境,IRM 就能排除 X2 的虚假关联,只保留 X1 的真实关联 —— 即便在 “X2→∞” 的极端测试环境中,模型仍能正确预测。
4.3 理论局限与实践观察
非线性不变性与环境数量:理论局限与实践观察
文档坦诚地指出了理论的局限性,并结合实验给出实践启示 —— 这部分体现了研究的严谨性。
1. 非线性不变性的理论挑战
线性 IRM 有完整的泛化理论(定理 9),但非线性 IRM(如用深度神经网络做(\Phi))面临一个关键问题:无法定义 “非线性一般位置假设”。
线性场景中,“环境多样性” 可用 “线性代数的维度” 衡量,但非线性场景中,环境差异的 “多样性” 无法用简单的数学条件描述 —— 比如 “如何衡量两个‘非线性环境’是否足够多样?”,目前没有统一答案。
文档表示:“非线性一般位置假设的形式化与证明” 是未来研究方向,当前非线性 IRM 的泛化能力主要靠实验验证(如彩色 MNIST 实验),而非理论保证。
2. 实践启示:环境数量不需要太多
定理 9 从理论上要求 “训练环境数量随特征维度线性增长”(比如 d 维特征需要 d 个环境),但实验发现:多数场景下,2 个训练环境就足够学习到不变性。
原因是:很多现实问题中,“虚假关联的变化速度远快于真实不变性”—— 比如 “奶牛分类” 中,“背景颜色”(虚假)在 2 个环境中就会变化(牧场→沙滩),而 “奶牛形状”(真实)在所有环境中稳定。此时,2 个环境足以让 IRM 区分 “虚假” 与 “真实”。
文档推测:这类问题的特点是 “若(\mathbb{E}[Y^e | \Phi(X^e)])在 2 个环境中一致,则(\Phi)必然提取了因果不变性”—— 未来研究需明确 “哪些问题只需少量环境”。
4.4 因果和不变性
因果即不变性:重新理解因果关系
文档第四部分的升华:不变性是因果关系的核心特征—— 这一观点打破了 “因果必须用因果图描述” 的传统认知,为机器学习与因果结合提供了新视角。
1. 传统因果方法的局限:依赖因果图
传统因果方法(如佩尔的 do - 演算、鲁宾的潜在结果模型)需要先知道 “因果图”(变量间的因果关系),但在机器学习的复杂场景中(如图像、文本),因果图根本无法绘制 —— 比如 “无法说清‘哪个像素是猫的原因’”。
2. 不变性:因果关系的 “可观测代理”
文档提出:因果关系的本质是 “干预下的不变性”—— 不需要因果图,只要一个关联在 “所有有效干预(环境)” 中稳定,它就是因果关联。
比如:
- 理想气体定律(PV=nRT):无法用因果图描述 “P、V、T 谁是因谁是果”,但它在 “温度变化、体积变化” 等所有有效干预中稳定 —— 因此是因果规律;
- 图像分类:“猫的形状特征与标签的关联” 在 “背景变化、光照变化” 等环境中稳定 —— 因此是因果关联,即便我们画不出 “像素→形状→标签” 的详细因果图。
对机器学习而言,这一观点的价值在于:无需先构建因果图,只需通过多环境数据学习 “不变关联”,就能间接捕捉因果关系——IRM 正是基于这一思想,让模型在 “无因果图先验” 的情况下,通过数据自动发现因果不变性。
4.5 IRM泛化本质
第四部分的核心结论:IRM 泛化的本质是 “因果不变性”
第四部分用因果理论为 IRM “正名”,核心结论可总结为 3 点:
- 环境的本质是干预:所有环境都是 “对同一 SEM 的有效干预”,共享 “Y 的因果生成规则”—— 这是 IRM 能泛化的前提;
- IRM 泛化的逻辑链:多样的训练环境→排除虚假关联→学到因果不变性→在所有环境中泛化;
- 因果即不变性:无需因果图,不变性是因果关系的 “可观测特征”——IRM 为 “机器学习自动发现因果关系” 提供了可行路径。
简单说,第四部分告诉我们:IRM 不是 “另一种正则化方法”,而是 “基于因果理论的泛化范式”—— 它的泛化能力不是偶然的,而是源于对 “因果不变性” 的捕捉。
ps:不变的相关性不一定是因果关系,但因果一定是不变的相关性(比如月亮出来与天黑存在相关性,但月亮出来并不是天黑的原因。而地球自转才是天黑的原因,地球自转,天会黑这存相关性)
4.6 小结
第四部分的作用 —— 为 IRM “立理论根基”
如果说第三部分是 “IRM 的工程实现”,第四部分就是 “IRM 的理论灵魂”:
- 它用 SEM 和干预定义 “环境”,明确了 “泛化的场景边界”;
- 它用定理 9 证明 “线性 IRM 的泛化能力”,让算法有理论支撑;
- 它提出 “因果即不变性”,为非线性 IRM 和未来研究指明方向;
- 它坦诚理论局限,结合实验给出实践启示,体现严谨性。
理解第四部分,就能理解 “为什么 IRM 比 ERM、领域自适应等方法更能泛化”—— 因为 IRM 学的是 “因果规律”,而其他方法学的是 “数据关联”;因果规律跨环境稳定,而数据关联会随环境变化。
五、实验
文档第五部分 “实验” 是整个研究的 “实证支撑”—— 通过合成数据实验(控制变量,验证理论)和彩色 MNIST 实验(贴近真实图像任务,验证非线性场景),直接对比 IRM 与传统方法(ERM、ICP)的性能,证明 “IRM 能有效学习不变性,实现分布外泛化”。下面按 “实验设计逻辑→结果解读→核心结论” 的顺序,拆解两个实验的细节,重点讲清 “实验要验证什么”“为什么这么设计”“结果如何支持 IRM 的优势”。
5.1 合成数据实验
第一个实验:合成数据实验 —— 控制变量,验证因果特征提取能力
合成数据实验的核心目标是:在 “已知因果结构” 的理想场景中,验证 IRM 能否准确识别 “因果特征”(如示例 1 中的 X₁)、剔除 “虚假特征”(如 X₂),同时对比 ERM(经验风险最小化)和 ICP(不变因果预测,此前的最优方法)的不足。
1. 实验设计:扩展示例 1,模拟更真实的复杂场景
为了全面测试 IRM 的鲁棒性,实验在示例 1 的基础上做了 3 点关键扩展(对应文档中的图 3),模拟现实中常见的 “模型误设”“特征混合”“混杂变量” 等问题:
| 扩展方向 | 具体设计 | 目的 |
|---|---|---|
| 1. 维度提升 | 将 X₁、X₂的维度从 1 维均提升到 10 维 | 模拟高维特征场景(如图像的像素),测试 IRM 在高维中筛选因果特征的能力 |
| 2. 加入隐藏混杂变量 H | 新增 10 维隐藏变量 H,H 会同时影响 X₁、Y、X₂(如 H 是 “光照强度”,同时影响 “物体形状(X₁)”“标签判断(Y)”“背景颜色(X₂)”) | 模拟 “未观测混杂”(现实数据中常见),测试 IRM 抗混杂的能力 |
| 3. 特征混合(S≠I) | 部分场景中,不直接观测真实特征 Z₁(因果)、Z₂(虚假),只观测混合后的 X=S (Z)(S 是正交矩阵,如 “像素被随机打乱”) | 模拟 “特征不可直接观测” 的场景,测试 IRM 能否从混合特征中恢复因果结构 |
此外,实验还设计了 8 种具体场景(用首字母组合标识),覆盖 “有无混杂”“同 / 异方差噪声”“特征是否混合” 等情况,确保结果的全面性:
- 全观测(F)/ 部分观测(P):F 表示无混杂(H 的影响为 0),P 表示有混杂(H 影响 X₁、Y、X₂);
- 同方差(O)/ 异方差(E):O 表示 Y 的噪声方差随环境变化,E 表示 X₂的噪声方差随环境变化;
- 混合观测(S)/ 非混合观测(U):S 表示观测混合后的 X=S (Z),U 表示直接观测 Z(S=I)。
实验数据生成逻辑(SEM):(\begin{align*} H^e &\leftarrow \mathcal{N}(0, e^2) \quad \text{(隐藏混杂变量,方差随环境e变化)} \ Z_1^e &\leftarrow \mathcal{N}(0, e^2) + W_{h→1}H^e \quad \text{(因果特征Z₁,受H影响)} \ Y^e &\leftarrow Z_1^e \cdot W_{1→y} + \mathcal{N}(0, \sigma_y^2) + W_{h→y}H^e \quad \text{(目标Y,受Z₁和H影响)} \ Z_2^e &\leftarrow W_{y→2}Y^e + \mathcal{N}(0, \sigma_2^2) + W_{h→2}H^e \quad \text{(虚假特征Z₂,受Y和H影响)} \ X^e &= S(Z_1^e, Z_2^e) \quad \text{(观测特征X,可能是Z的混合)} \end{align*})
- 训练环境:E_tr = {0.2, 2, 5}(3 个环境,e 控制 H 和 Z₁的方差);
- 对比方法:ERM(合并所有环境数据)、ICP(传统不变因果预测)、IRM(IRMv1,用 e=5 交叉验证正则化参数 λ)。
2. 评价指标:聚焦 “因果特征提取准确性”
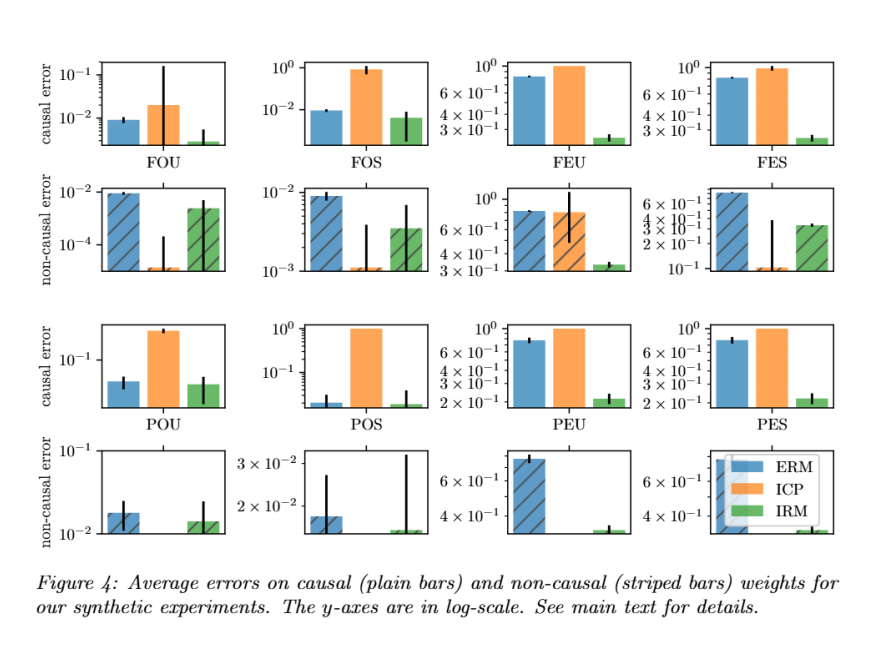
实验用两个核心指标衡量模型性能(对应文档中的图 4),避免 “只看预测误差” 的片面性 —— 因为有些方法(如 ICP)可能预测误差低,但没学到真正的因果特征:
| 指标名称 | 计算方式 | 含义(目标) |
|---|---|---|
| 因果权重误差(实心柱) | 估计的因果权重(\hat{M}{1→y})与真实权重(W{1→y})的平均平方误差 | 衡量模型 “提取因果特征(Z₁)” 的准确性→越小越好 |
| 非因果权重误差(条纹柱) | 估计的非因果权重(\hat{M}_{y→2})的范数 | 衡量模型 “是否剔除虚假特征(Z₂)”→理想值为 0 |
注:(\hat{M})是 “解混合后的权重”—— 因为部分场景中 X 是 Z 的混合(X=S (Z)),需要通过(S^\top)反推回 Z 空间的权重,确保指标能直接对应因果 / 非因果特征。
3. 实验结果:IRM 全面优于 ERM 和 ICP
图 4 的结果(纵轴为对数尺度,差异更明显)可总结为 3 个关键结论:
- IRM 的因果权重误差最小:在所有 8 种场景中,IRM 对 “因果特征 Z₁权重” 的估计最接近真实值 —— 比如在 “FOS(全观测 + 同方差 + 混合)” 场景中,IRM 的因果误差比 ERM 小 1-2 个数量级(对数尺度下差距显著);
- IRM 的非因果权重误差最接近 0:IRM 能有效剔除虚假特征 Z₂,非因果权重的范数远小于 ERM(ERM 几乎完全依赖 Z₂的虚假关联);
- ICP 表现保守,泛化能力有限:ICP 虽能部分剔除虚假特征(非因果误差小),但会 “过度排除因果特征”(因果误差大)—— 因为 ICP 对 “残差分布不变” 的要求过严(如 Y 的噪声变化会导致残差分布变化),导致它误将 Z₁排除在因果特征之外。
核心启示:在 “已知因果结构” 的场景中,IRM 能精准定位因果特征、剔除虚假关联,且鲁棒性强(不受混杂、特征混合、噪声变化的影响),而 ERM 和 ICP 分别因 “依赖虚假关联” 和 “条件过严” 无法达到理想效果。
5.2 彩色MNIST实验
第二个实验:彩色 MNIST 实验 —— 验证非线性、复杂感知任务的泛化能力
合成数据实验验证了 IRM 在 “线性、已知因果” 场景的有效性,而彩色 MNIST 实验的目标是:在 “非线性、感知输入(图像)、虚假关联更强” 的真实场景中,验证 IRM 能否学习非线性不变性,实现分布外泛化。
1. 实验设计:构造 “颜色 - 标签” 虚假关联,逼模型做选择
实验基于 MNIST 手写数字数据集(原始为灰度图),通过 “染色” 构造强虚假关联,模拟现实中 “模型易被表面特征误导” 的场景(如奶牛分类中 “背景颜色” 比 “动物形状” 易学习):
(1)核心矛盾设计:虚假关联强于真实关联
- 真实关联:数字本身(如 0-4 为类 0,5-9 为类 1)→ 模型需要学习 “数字形状” 这一不变特征;
- 虚假关联:颜色(红 / 绿)与标签的强相关性→ 构造上,“颜色 - 标签” 的相关性(如 80% 红色对应类 0)远强于 “数字 - 标签” 的相关性(如 60% 数字 0 对应类 0),迫使 ERM 优先学习颜色。
(2)环境构造:3 个环境,测试 “虚假关联反转” 的泛化
实验生成 2 个训练环境、1 个测试环境,关键差异是 “颜色 - 标签” 的相关性强度(用概率 p^e 控制),具体步骤:
- 分配初步标签(\bar{y}):数字 0-4→(\bar{y}=0),5-9→(\bar{y}=1);
- 翻转初步标签:以 0.25 概率翻转(\bar{y}),得到最终标签 y(增加任务难度,避免数字与标签完全对应);
- 采样颜色标识 z:以概率 p^e 翻转 y,得到 z(z=1→红色,z=0→绿色)——p^e 是环境的核心差异:
- 训练环境 1(e1): p^e =0.2(20% 概率翻转 y→80% 红色对应原 y);
- 训练环境 2(e2): p^e =0.1(10% 概率翻转 y→90% 红色对应原 y);
- 测试环境(e_test): p^e =0.9(90% 概率翻转 y→10% 红色对应原 y,即 “颜色 - 标签” 相关性反转)。
(3)对比方法:4 种方法,突出 IRM 的优势
| 方法 | 核心逻辑 | 作用(对照) |
|---|---|---|
| ERM | 合并两个训练环境数据,最小化交叉熵损失 | baseline,验证 “依赖虚假关联” 的泛化失败 |
| IRM | 用 IRMv1 训练,最小化 “经验风险 + 不变性惩罚” | 核心方法,验证能否剔除颜色、学习数字形状 |
| 随机猜测 | 50% 准确率 | 衡量模型是否优于随机 |
| Oracle(灰度 MNIST 模型) | 仅用灰度图训练(强制忽略颜色) | 最优上限,验证 IRM 是否接近理想不变性 |
2. 实验结果:IRM 突破虚假关联,实现有效泛化
(1)准确率对比(表 1):IRM 在测试环境中碾压 ERM
| 方法 | 训练环境准确率 | 测试环境准确率 | 关键结论 |
|---|---|---|---|
| ERM | 87.4±0.2 | 17.1±0.6 | 训练时依赖颜色(虚假关联),测试时因颜色反转崩溃,准确率远低于随机 |
| IRM | 70.8±0.9 | 66.9±2.5 | 训练准确率略低(未依赖颜色),但测试准确率显著提升,接近最优 |
| 随机猜测 | 50 | 50 | 基准线,IRM 远超随机 |
| Oracle(灰度) | 73.5±0.2 | 73.0±0.4 | 最优上限,IRM 性能接近 Oracle,证明其学到了数字形状这一不变特征 |
关键解读:ERM 的高训练准确率是 “虚假的”(靠颜色),而 IRM 牺牲了部分训练准确率,换来了真正的泛化能力 —— 这正是 IRM 的核心价值:不追求 “训练集上的表面误差小”,而追求 “跨环境的不变性”。
(2)模型行为分析(图 5):IRM 的预测更接近不变性
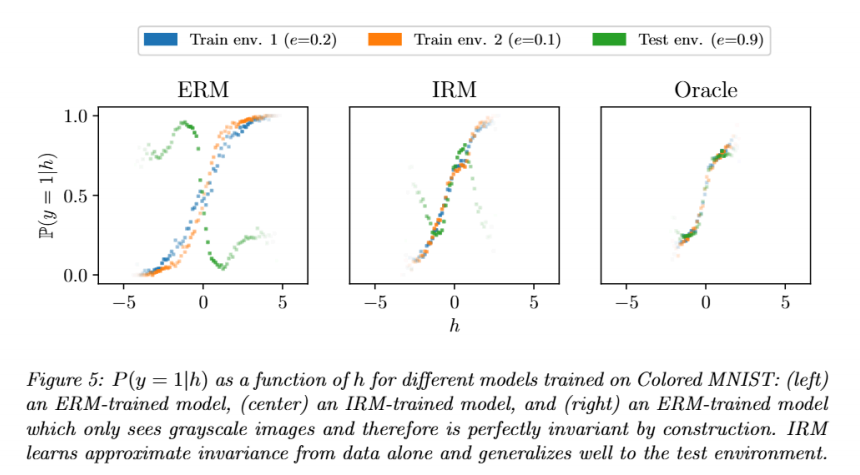
实验通过 “P (y=1|h) 曲线”(h 是模型输出的 logit 值,即 Φ(X)),直观展示不同模型的不变性:
- 横轴 h:模型对 “数字形状” 的判断(h 越大,模型认为是类 1 的概率越高);
- 纵轴 P (y=1|h):在给定 h 的情况下,真实标签为 1 的概率(理想情况下,不同环境的曲线应重合,即不变性)。
结果对比:
- ERM:不同环境的曲线差异极大(尤其是测试环境曲线与训练环境几乎反转)→ 证明 ERM 完全依赖颜色,h 无法反映真实数字形状;
- IRM:不同环境的曲线更接近(尤其是训练环境 1 和 2 几乎重合,测试环境曲线虽有偏差但未反转)→ 证明 IRM 学到的 h(数字形状)具有不变性,P (y|h) 跨环境稳定;
- Oracle:所有环境的曲线几乎完全重合→ 理想不变性的参照,IRM 的曲线趋势与 Oracle 一致,进一步证明 IRM 学到了数字形状。
3. 补充讨论:IRM vs 条件领域自适应
文档特别提到:条件领域自适应(C-ADA,匹配 P (Φ(X)|Y))在该实验中可能表现与 IRM 相近,但这是 “特殊场景下的巧合”—— 因为该实验中 “数字形状的分布” 和 “P (Y|e)” 在环境间一致。若场景变化(如训练环境 1 是数字 0-4,训练环境 2 是数字 5-9,即数字分布变化),C-ADA 会因 “强制匹配 P (Φ(X)|Y)” 而失败,而 IRM 仍能通过 “P (Y|Φ(X)) 不变” 实现泛化 —— 这再次证明 IRM 对 “不变性本质” 的把握更准确。
5.3 小结
第五部分的核心结论:IRM 的有效性与通用性
两个实验从 “理想控制场景” 到 “真实感知场景”,层层递进验证了 IRM 的价值:
- 有效性:IRM 能准确提取因果特征(合成数据)、剔除虚假关联(彩色 MNIST),泛化能力远超 ERM 和 ICP;
- 通用性:无论是线性高维数据、带混杂变量的数据,还是非线性图像数据,IRM 都能稳定工作;
- 合理性:IRM 牺牲部分训练准确率以换取不变性,最终在分布外场景中获得远超传统方法的性能 —— 这正是 “分布外泛化” 的核心诉求:不追求训练集上的 “完美拟合”,而追求对未知场景的 “鲁棒适应”。
简言之,第五部分用扎实的实验证明:IRM 不是理论上的 “空中楼阁”,而是能在实际任务中解决 “传统方法泛化失败” 的有效范式。
六、展望:结语对话
文档第六部分以 “苏格拉底式对话” 的形式,通过两名研究生(Eric 和 Irma)的讨论,从 “ERM 的缺陷根源”“IRM 的核心价值”“不变性的潜在应用” 三个维度,通俗拆解了 IRM 与传统机器学习的本质差异,并启发未来研究方向。对话没有复杂公式,而是用 “问题 - 讨论 - 反思” 的逻辑,把前文的理论和算法落地到 “为什么 IRM 有用”“什么时候用 IRM”“IRM 还能做什么” 等实际问题上。下面按对话的核心议题,逐模块解析:
6.1 ERM的错误前提
核心议题 1:ERM 的 “大谎言”——iid(独立同分布) 假设的破裂
对话开篇就直击 ERM 的根本缺陷:依赖 “训练数据与测试数据独立同分布(iid)” 的假设,但这一假设在现实中几乎不成立(被 Ghahramani 教授称为 “机器学习的大谎言”)。两人进一步拆解了 “非 iid 场景” 的两种核心情况,以及 IRM 的应对思路:
1. 情况 1:输入边际分布变化(协变量偏移)——P (X) 变,P (Y|X) 不变
-
场景举例:训练数据是 “白天拍的猫(X1)”,测试数据是 “夜晚拍的猫(X2)”—— 猫的特征(X)分布变了(白天清晰 / 夜晚模糊),但 “猫的特征→标签(Y)” 的关联(P (Y|X))不变(不管白天夜晚,“四条腿 + 尖耳朵” 都是猫)。
-
ERM 的问题:若训练测试 X 的支撑集(取值范围)不重叠(比如训练只有白天图,测试只有夜晚图),ERM 无法泛化 —— 因为它没学到 “跨 X 分布的不变关联”,只拟合了白天 X 的特征。
-
IRM 的应对思路:
思路 1:学习 “不变表示 Φ(X)”,让 Φ(X1) 和 Φ(X2) 的支撑集一致(比如把 “白天 / 夜晚的猫” 都转化为 “轮廓特征”),再在 Φ 上训练不变分类器。但附录 D 证明这种 “匹配特征分布” 的思路有缺陷(可能破坏因果关联)6。
思路 2:假设 “不变分类器 w 的结构简单”(如线性),即便 X 的支撑集不重叠,也能通过多环境数据估计 w(比如从 “白天猫” 学 “轮廓→猫” 的线性规则,直接用到 “夜晚猫” 的轮廓上)。IRM 采用的正是思路 2,通过 “固定 w=1.0 + 优化 Φ”,避开 “匹配特征分布” 的陷阱。
2. 情况 2:条件分布变化(P (Y|X) 变)—— 反因果任务的难题
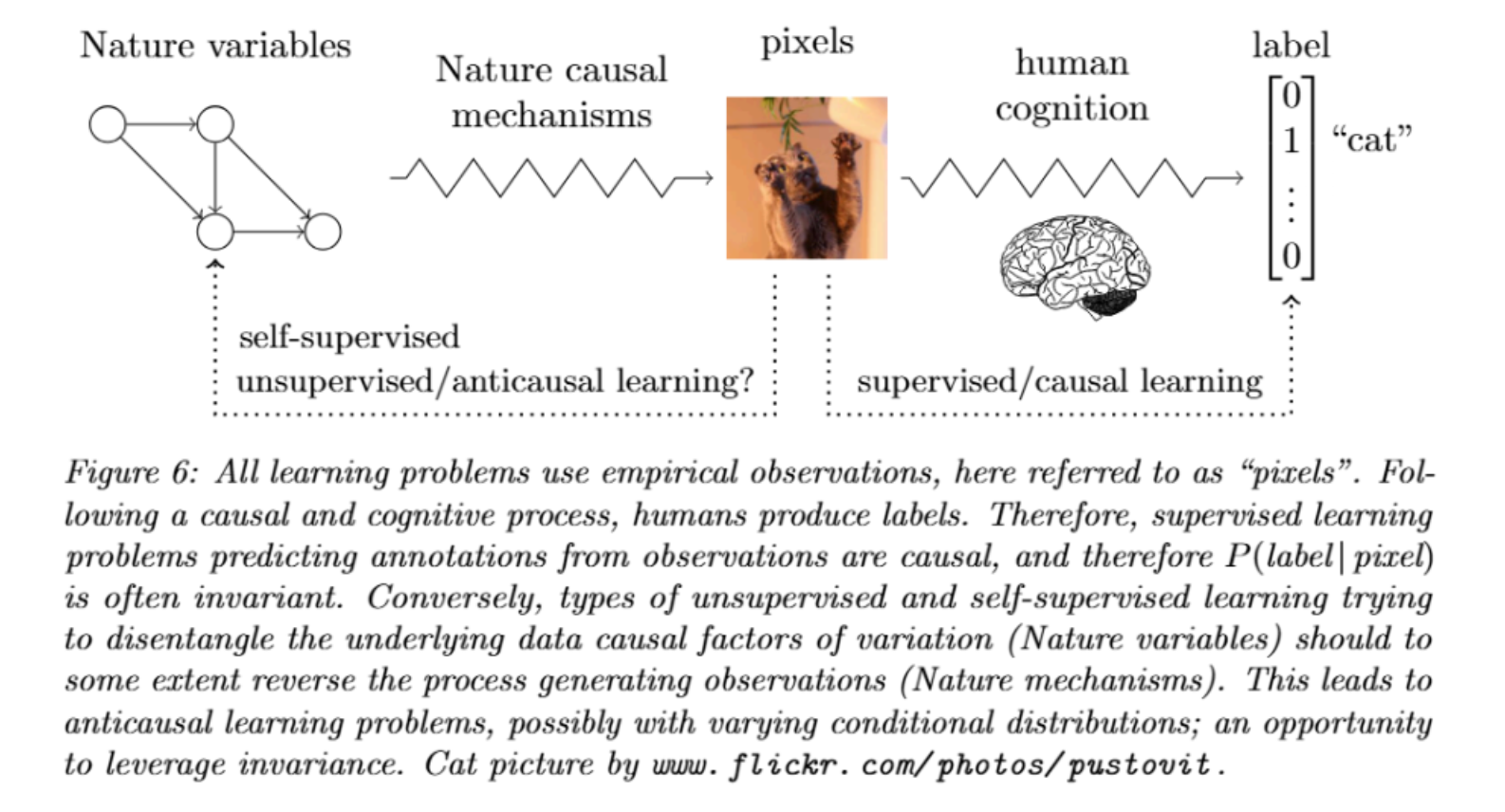
- 关键区分:Schölkopf 教授提出 “因果任务” 与 “反因果任务” 的差异:
- 因果任务:X 是 Y 的 “因”(如 “猫的特征(X)→是否是猫(Y)”),P (Y|X) 跨环境稳定,ERM 有效;
- 反因果任务:X 是 Y 的 “果”(如 “MNIST 像素(X)是‘数字概念(Y)’的果”),P (Y|X) 可能随环境变(比如不同书写者的像素分布不同),ERM 易失效。
- 对话的补充观点:Eric 认为 “监督学习中预测人类标注的任务是因果的”—— 因为标注过程是 “人类看到 X→产生 Y”,P (Y|X) 因标注规范而稳定(比如不同环境下,“猫的像素” 都对应 “猫” 的标签),这解释了 “为什么 ERM 在多数监督任务中有效”;但无监督 / 自监督任务(如从像素反推因果因子)是反因果的,P (Y|X) 可能变,需要 IRM 的不变性来泛化。
6.2 过参数化的陷阱
核心议题 2:过参数化的陷阱 ——ERM 为何偏爱虚假关联
对话接着讨论了神经网络 “过参数化”(参数数≥样本数)时,ERM 的另一个缺陷:优先选择 “低容量解”,导致吸收虚假关联。这正是前文 “奶牛分类”“X1 是因、X2 是果” 例子的深化:
1. 过参数化的本质矛盾
- 数学例子:假设用 X=(X1,X2) 预测 Y,其中 X1 是因(Y=1e6・X1・α1),X2 是果(X2=1e6・Y・α2・e),且输入维度 2n(n 为样本数,过参数化)。
- SGD 的偏向:过参数化时,SGD 会选 “容量最小的零误差解”7——X2 与 Y 的关联更直接(X2 是 Y 的线性函数),容量需求低,因此 SGD 优先学 X2 的虚假关联;而 X1 是 Y 的因,关联更复杂(需更大容量),被 SGD 忽略。
- IRM 的解决方案:通过 “不变性惩罚项”,迫使模型意识到 “X2 的关联随环境 e 变化(虚假),X1 的关联不变(因果)”,即便过参数化,也会优先学 X1—— 相当于 “用不变性打破‘低容量解 = 好解’的偏见”。
2. 容量不足的补救:IRM 与 ERM 的平衡
对话还提到 “假设类容量不足” 的场景(如用线性模型预测二次函数 Y=X²):此时强行追求不变性,只能得到 “零预测器”(线性模型无法拟合二次关联)。
- 应对策略:通过交叉验证降低 IRM 的不变性惩罚项 λ,让模型 “适度妥协”—— 优先保证基础预测能力(ERM 的优势),再逐步提升不变性。
- 核心启示:IRM 不是 “替代 ERM”,而是 “补充 ERM”—— 在 ERM 失效的场景(分布变化、过参数化),IRM 的不变性惩罚发挥作用;在 ERM 有效的场景(容量不足、P (Y|X) 稳定),IRM 可灵活调整,避免 “为了不变性牺牲预测能力”。
6.3 IRM 的未来方向
IRM 的未来方向 —— 不变性的扩展性
对话最后跳出 “分类任务”,探讨了 IRM 在其他领域的潜力,这些方向也是前文理论的自然延伸:
1. 强化学习(RL):episodes 作为 “环境”
- 思路:把强化学习的 “每个回合(episode)” 视为不同环境(如 “迷宫 1”“迷宫 2”“迷宫 3”),每个环境的 “状态分布” 不同,但 “动作→奖励” 的因果关联不变(如 “向右走→到达终点” 在所有迷宫中都成立)。
- IRM 的价值:学习 “跨 episodes 的不变政策”,避免 RL agent 因 “环境细节变化”(如迷宫墙壁颜色变)而失效,实现鲁棒的强化学习。
2. 公平性:群体作为 “环境”
- 思路:把 “不同人群” 视为不同环境(如 “男性群体”“女性群体”“老年群体”),公平性的核心是 “对具有相似相关特征的个体,处理方式跨群体不变”(如 “相同学历 + 相同工作经验” 的人,无论性别,都应得到相同的薪资预测)。
- IRM 的价值:通过 “群体间的不变性惩罚”,迫使模型忽略 “性别、种族” 等无关特征,只依赖 “学历、经验” 等因果特征,从机制上解决算法偏见。
3. 理论深化:群论视角的形式化
- 思路:用 “群论” 中的 “不变性”“等变性” 概念,为 IRM 提供更严谨的数学基础 —— 比如 “平移不变性”(卷积的核心)是群论中的 “群作用下的不变性”,IRM 的 “跨环境不变性” 可视为 “环境群作用下的不变性”。
- 意义:目前 IRM 的非线性理论仍不完善(如非线性一般位置假设),群论可能为 “非线性能不变性” 的惩罚项设计、泛化保证提供新工具。
6.4 小结
对话的核心价值:不是 “给答案”,而是 “启思考”
与前文的 “理论推导”“实验验证” 不同,第六部分的对话更像是 “研究总结与展望”,它的意义在于:
- 通俗化理论:用 “奶牛、MNIST、冰淇淋与溺水人数” 等例子,把 “因果不变性”“过参数化” 等抽象概念转化为可感知的问题;
- 澄清误解:明确 “IRM 不是 ERM 的敌人,而是补充”——ERM 在 “iid、监督、可实现场景” 中仍有效,IRM 在 “分布变化、反因果、过参数化场景” 中发挥作用;
- 打开视野:指出 IRM 的潜力不止于 “分类任务”,而是能延伸到强化学习、公平性、群论理论等领域,为后续研究提供方向。
简言之,这段对话是整篇论文的 “灵魂升华”—— 它从 “技术细节” 回到 “问题本质”,让读者明白:IRM 的核心不是 “一个新算法”,而是 “一种新的学习哲学”——从 “拟合数据关联” 转向 “寻找因果不变性”,这正是机器学习突破 “分布外泛化” 瓶颈的关键。
附录
该论文附录(A-D)是对正文核心理论、算法与实验的关键补充,分别从理论扩展、数学证明、竞品缺陷分析、工程实现四个维度,解决正文未深入的技术细节与逻辑漏洞,为 IRM 的严谨性和可复现性提供支撑。以下按附录模块逐一拆解:
附录 A:额外定理 —— 线性一般位置的普遍性
附录 A 仅含定理 10,核心作用是为正文第 4 章 “IRM 泛化理论” 中的 “线性一般位置假设” 提供理论保障,证明该假设在现实场景中 “几乎必然成立”,消除 “假设过于严格、难以满足” 的担忧。
定理 10 的核心内容
设两个关键统计量:
- (\sum_{X,X}^e = \mathbb{E}[X^e (X^e)^\top]):环境e下输入特征(X^e)的协方差矩阵(对称正半定矩阵,记为(\mathbb{S}_+^{d×d})空间);
- (\sum_{X,\epsilon}^e = \mathbb{E}[X^e \epsilon^e]):环境e下输入(X^e)与噪声(\epsilon^e)的协方差向量((\mathbb{R}^d)空间)。
定理结论:对任意给定的({ \sum_{X,\epsilon}^e }{e \in \mathcal{E}{tr}})(噪声协方差向量集合),不满足 “线性一般位置” 的协方差矩阵集合({ \sum_{X,X}^e }{e \in \mathcal{E}{tr}}),在所有可能的协方差矩阵空间中 “测度为零”。
通俗解读
“测度为零” 意味着:在现实中随机生成多个训练环境的协方差矩阵,几乎不可能出现 “不满足线性一般位置” 的情况 —— 换句话说,“线性一般位置假设” 不是苛刻的限制,而是大多数真实场景的自然属性。这为正文定理 9(IRM 泛化能力)的实用性提供了关键支撑:无需担心训练环境 “不够多样”,只要数据来自真实场景,环境多样性通常能满足要求。
附录 B:数学证明 —— 核心命题与定理的严谨推导
附录 B 是论文的 “逻辑基石”,通过拉格朗日乘数法、线性代数、流形理论等工具,为正文 3 个核心结论提供严格数学证明,确保理论无漏洞。
B.1 命题 2 的证明:鲁棒学习等价于加权 ERM
命题 2 回顾
鲁棒学习的目标(最小化跨环境最大误差:(\min_f \max_{e \in \mathcal{E}{tr}} R^e(f) - r_e),(r_e)为环境基线),在 KKT 可微性条件下,等价于 “最小化环境风险的加权平均”:(\exists \lambda_e \geq 0),使得鲁棒学习的最优解是(\sum{e} \lambda_e R^e(f))的一阶驻点。
证明核心逻辑
- 转化为约束优化:将鲁棒学习的 “max-min 目标” 转化为带约束的最小化问题 —— 最小化M, subject to (R^e(f) - r_e \leq M)(对所有e);
- 构造拉格朗日函数:(L(f,M,\lambda) = M + \sum_{e} \lambda_e (R^e(f) - r_e - M)),其中(\lambda_e \geq 0)是拉格朗日乘数;
- KKT 条件推导:最优解需满足 “梯度为零”,即(\nabla_f L = \sum_{e} \lambda_e \nabla_f R^e(f) = 0)—— 这恰好是 “加权 ERM 的一阶最优条件”。
证明意义
戳破 “鲁棒学习优于 ERM” 的误区:鲁棒学习本质是 “给不同环境风险加权重”,仍属于 ERM 的扩展,无法像 IRM 那样学习跨环境不变性,最终会因依赖虚假关联导致泛化失败(如正文示例 1 中,鲁棒学习仍会给(X_2)大权重)。
B.2 定理 4 的证明:标量分类器(w=1.0)的等价性
定理 4 回顾
任何线性不变预测器(v = \Phi^\top w)((\Phi)为数据表示矩阵,w为分类器权重),都可分解为 “秩 1 的(\Phi)” 与 “标量(w=1.0)”—— 即无需优化w,只需优化(\Phi),让(\Phi^\top \cdot 1.0)成为不变预测器。
证明核心逻辑
- 子空间等价性:(\Phi)的可达空间(G_\Phi = { \Phi^\top w | w \in \mathbb{R}^p })(所有可能的预测器),等价于(\Phi)零空间的正交补空间(Ker(\Phi)^\perp)(线性代数中 “列空间与零空间正交” 的推论);
- 最优性条件推导:若w是所有环境的最优分类器,则(\Phi \nabla R^e(\Phi^\top w) = 0)(梯度为零),即(\nabla R^e(v) \in Ker(\Phi));
- 正交性与分解:由(v \in Ker(\Phi)^\perp)和(\nabla R^e(v) \in Ker(\Phi)),可得(v^\top \nabla R^e(v) = 0)—— 此时可构造秩 1 的(\Phi),让(v = \Phi^\top \cdot 1.0),实现等价分解。
证明意义
为 IRMv1 的 “固定(w=1.0)” 提供理论依据:无需优化w,仅通过(\Phi)的非线性特征提取,就能覆盖所有线性不变预测器的表达能力,既简化优化(避免参数冗余),又不损失模型能力。
B.3 定理 9 的证明:IRM 泛化到所有环境的条件
定理 9 回顾
若训练环境满足 “r阶线性一般位置”,且 IRM 学到秩为r的表示(\Phi),则(\Phi)引出的预测器在所有环境中都不变(即分布外泛化)。
证明核心逻辑
- 反证法构造矛盾:假设(\Phi^\top w \neq \tilde{S}^\top \gamma)((\tilde{S}^\top \gamma)是真实因果预测器),则由线性一般位置假设,(dim(span{ q_e }) > d-r)((q_e)是违反正规方程的残差向量);
- 零空间维度冲突:但(q_e \in Ker(\Phi))(由 IRM 的优化条件),若(dim(span{ q_e }) > d-r),则(dim(Ker(\Phi)) > d-r)—— 与(\Phi)秩为r((dim(Ker(\Phi)) = d-r))矛盾;
- 结论推导:因此假设不成立,(\Phi^\top w = \tilde{S}^\top \gamma),即预测器在所有环境中不变。
证明意义
首次从数学上证明 “IRM 的不变性可迁移到未见过的环境”,将 IRM 从 “工程算法” 提升为 “有泛化保证的理论范式”。
B.4 定理 10 的证明:线性一般位置的测度为零
证明核心逻辑
- 流形横截性理论:定义映射(G(x))描述环境协方差与残差的关系,证明(G(x))的像集W与 “低秩矩阵集(LR(m,d,k))” 横截(要么不相交,要么相交维度合理);
- 维度计数矛盾:若(k < d-r)且(m > \frac{d}{r} + d-r),则(dim(W) + dim(LR(m,d,k)) - dim(\mathbb{R}^{m×d}) < 0)—— 横截相交的维度为负,不可能发生,故W与(LR(m,d,k))不相交;
- 测度为零结论:不满足线性一般位置的协方差矩阵集是(LR(m,d,k))的子集,故测度为零。
附录 C:领域自适应(DA)的失败案例
附录 C 是 IRM 的 “竞品对比分析”,通过具体场景证明传统领域自适应方法(如 ADA、C-ADA)无法学习因果不变性,凸显 IRM 的优势。
核心观点
领域自适应的核心思路(匹配特征分布(P(\Phi(X^e))))与 IRM 的目标(匹配条件分布(P(Y|\Phi(X^e))))本质冲突 —— 前者追求 “表面分布一致”,后者追求 “因果关联不变”,导致 DA 在多种场景下失效。
案例 1:标签分布变化导致 DA 泛化灾难
场景设定
- 源环境(e_s):(P(Y=1) = 1/2)(正样本占 50%);
- 目标环境(e_t):(P(Y=1) = 9/10)(正样本占 90%);
- 真实因果关联:(P(Y|X))跨环境不变(X是 Y 的因)。
DA 的失败过程
- ADA 强制(P(\Phi(X^{e_s})) = P(\Phi(X^{e_t}))),间接导致预测分布(P(\hat{Y}^{e_s}) = P(\hat{Y}^{e_t}))((\hat{Y} = w(\Phi(X))));
- 目标环境中 90% 是正样本,但模型预测正样本占比被强制为 50%,大量正样本被误判,准确率仅 20%(低于随机猜测);
- 对比 IRM/ERM:ERM 因(P(Y|X))不变,在目标环境准确率达 80%,IRM 泛化能力更优。
失败根源
DA 混淆 “边际分布不变” 与 “条件分布不变”—— 真实不变性是(P(Y|X)),而非(P(X)),强制(P(X))一致会破坏因果关联。
案例 2:条件领域自适应(C-ADA)无法识别真实不变性
C-ADA 的改进思路
按标签分组匹配分布:对每个y,强制(P(\Phi(X)|Y=y))在源 / 目标环境一致,试图解决 “标签分布变化” 问题。
失败过程(离散特征场景)
- 数据生成:(Y^e = F(X^e) \oplus Bernoulli(p))((F(X))是真实标签,加噪声),(P(X^e))是跨环境唯一变量;
- 平凡表示(\Phi(x)=x):能引出不变预测器((P(Y|\Phi(X)))不变),但 C-ADA 需(P(\Phi(X)|Y=y))一致;
- 测度为零结论:通过贝叶斯公式推导,满足(P(\Phi(X)|Y=y))一致的(\Phi)集合 “测度为零”——C-ADA 几乎不可能找到(\Phi(x)=x),最终丢弃真实不变性。
失败根源
C-ADA 的 “条件分布匹配” 是过强且不必要的约束:真实不变性只需(P(Y|\Phi(X)))一致,无需(P(\Phi(X)|Y))一致,强制后者会排除有效不变表示。
DA 的共性缺陷
DA 的误差界((Error^{e_t} \leq Error^{e_s} + Distance(\Phi(X^{e_s}), \Phi(X^{e_t})) + \lambda^))中,(\lambda^)(最优分类器误差)被视为常数,但(\lambda^)实际依赖(\Phi)——DA 为匹配分布可能导致(\lambda^)增大,最终泛化性能下降,而 IRM 直接优化(P(Y|\Phi(X))),避开这一陷阱。
附录 D:IRM 的 PyTorch 最小实现
附录 D 是 “工程落地指南”,提供极简代码示例,展示 IRMv1 的核心逻辑(双小批量无偏估算惩罚项、端到端训练),帮助读者快速复现算法。
核心代码模块解析
1. 惩罚项计算函数(compute_penalty)
def compute_penalty(losses, dummy_w):
# losses:2b个样本的损失(前b个来自B1,后b个来自B2)
# dummy_w:虚拟标量w=1.0(用于触发梯度计算)
g1 = grad(losses[0::2].mean(), dummy_w, create_graph=True)[0] # B1的梯度
g2 = grad(losses[1::2].mean(), dummy_w, create_graph=True)[0] # B2的梯度
return (g1 * g2).sum() # 两两相乘求和,无偏估算梯度范数平方
- 双小批量拆分:通过
losses[0::2]和losses[1::2],从 2b 个样本中拆分出两个独立小批量 B1、B2; - 梯度计算:
create_graph=True保留计算图,确保惩罚项的梯度能反向传播到(\Phi); - 无偏估算:(g1 \cdot g2)的期望等于(| \nabla R^e |^2),解决单个小批量的偏差问题。
2. 数据生成函数(example_1)
模拟正文示例 1 的线性场景:(X_1 \sim \mathcal{N}(0, env^2)),(Y = X_1 + \mathcal{N}(0, env^2)),(X_2 = Y + \mathcal{N}(0, 1)),返回输入(X=(X_1,X_2))和目标Y。
3. 训练循环
- 模型参数:(\Phi)用 4×1 矩阵(输入 4 维:(X_1)的 2 维扩展 +(X_2)的 2 维扩展),
dummy_w=1.0固定; - 损失计算:经验风险项(MSE)+ 惩罚项((\lambda=1),通过
1e-5 * error + penalty平衡量级); - 优化目标:仅优化(\Phi),
dummy_w仅用于求导,不实际更新。
代码意义
验证 IRMv1 的可实现性:仅需几十行代码就能实现核心逻辑,且训练后(\Phi)的权重会向(X_1)倾斜(忽略(X_2)的虚假关联),证明 IRM 在工程上简洁且有效。
附录整体价值总结
| 附录 | 核心作用 | 对正文的支撑 |
|---|---|---|
| A | 理论保障 | 证明 “线性一般位置” 是自然属性,消除假设苛刻性担忧 |
| B | 逻辑严谨 | 推导核心命题 / 定理,确保 IRM 的理论无漏洞 |
| C | 竞品对比 | 凸显 IRM 相对于 DA 的优势,明确 IRM 的定位 |
| D | 工程落地 | 提供极简实现,降低复现门槛,验证算法可行性 |
四个附录从 “理论 - 逻辑 - 对比 - 工程” 全方位支撑正文,使 IRM 不仅是 “想法”,更是 “有证明、有优势、可实现” 的完整泛化范式。
名词解析
1 正规方程
下面从 “线性回归的目标→正规方程的推导→公式含义→与 IRM 的关联→优缺点” 五个维度,用通俗语言 + 简单公式拆解,完全避开复杂的线性代数推导门槛。
一、先明确背景:为什么需要正规方程?
正规方程的应用场景是线性回归—— 比如 “用(X_1)(奶牛形状)和(X_2)(背景颜色)预测Y(是否是奶牛)”,线性回归的模型是:(\hat{Y} = \theta_0 + \theta_1 X_1 + \theta_2 X_2)其中(\theta_0)(截距)、(\theta_1)((X_1)的系数)、(\theta_2)((X_2)的系数)是我们要学的 “最优参数”。
线性回归的目标是最小化 “预测值(\hat{Y})和真实值Y的均方误差”,即:(L(\theta) = \frac{1}{n} \sum_{i=1}^n (Y_i - \hat{Y}i)^2 = \frac{1}{n} \sum{i=1}^n (Y_i - (\theta_0 + \theta_1 X_{i1} + \theta_2 X_{i2}))^2)
要找最小化(L(\theta))的(\theta),有两种方法:
- 梯度下降:通过多次迭代,逐步调整(\theta)直到误差收敛(适合数据量大、特征多的场景);
- 正规方程:直接通过数学推导,解出(\theta)的解析解(适合数据量小、特征少的场景,也方便理论分析)。
文档第三部分用正规方程,正是因为它能提供 “线性分类器最优的严格条件”—— 这是设计(\mathbb{D}_{lin})惩罚项的关键。
二、正规方程怎么来的?—— 核心是 “导数为零找极值”
要找到让误差(L(\theta))最小的(\theta),数学上的核心思路是:对(L(\theta))关于每个(\theta)求偏导数,令导数等于 0,解方程组得到(\theta)。
为了简化计算,我们先把 “带截距的模型” 转化为 “矩阵形式”(这是正规方程的标准写法):
- 给每个样本增加一列 “1”(对应截距(\theta_0)),把特征矩阵X扩展为(n \times (d+1))的矩阵(n是样本数,d是特征数);
- 把参数(\theta = [\theta_0, \theta_1, \theta_2]^T)写成向量形式;
- 预测值(\hat{Y} = X \cdot \theta)(矩阵乘法,代替逐个样本计算);
- 误差(L(\theta) = \frac{1}{n} | Y - X\theta |^2)((| \cdot |^2)是 “平方和”,简化写法)。
接下来对(L(\theta))关于(\theta)求导(利用矩阵求导法则),令导数等于 0,整理后就能得到:(\boxed{X^T X \theta = X^T Y})这就是正规方程的核心等式。再把(\theta)解出来(假设(X^T X)可逆):(\boxed{\theta = (X^T X)^{-1} X^T Y})
三、正规方程的通俗含义:“最优系数的公式”
上面的公式看起来抽象,我们用 “文档中的线性分类器场景” 翻译一下:在文档第三部分,线性分类器的参数是w(对应这里的(\theta)),数据表示是(\Phi(X))(对应这里的X),目标变量是Y。因此,文档中 “基于(\Phi(X))的最优线性分类器(w_\Phi^e)”,用正规方程写出来就是:(w_\Phi^e = \left( \mathbb{E}[\Phi(X^e)\Phi(X^e)^T] \right)^{-1} \mathbb{E}[\Phi(X^e)Y^e])(文档里用 “期望(\mathbb{E})” 代替 “样本平均”,是从统计理论角度的严格写法,和上面的样本形式本质一致 —— 把(X^T X)理解为 “样本特征的协方差相关矩阵”,(X^T Y)理解为 “样本特征与目标的协方差向量”)。
这个公式的通俗含义是:只要把特征(\Phi(X))和目标Y代入,通过一次矩阵运算,就能直接得到 “让均方误差最小” 的最优分类器(w_\Phi^e)—— 这就是线性回归的 “最优解”。
四、为什么文档第三部分这么重视正规方程?—— 和 IRM 的关联
文档第三部分设计(\mathbb{D}_{lin})惩罚项时,核心思路就是 “绕开求逆,直接用正规方程的等式判断最优性”:
- 正规方程的核心等式是(X^T X \theta = X^T Y)(或文档中的(\mathbb{E}[\Phi\Phi^T] w = \mathbb{E}[\Phi Y]));
- 对一个分类器w来说,“是否是最优” 等价于 “是否满足这个等式”—— 如果满足,说明w是最优的;如果不满足,“等式两边的差距” 就是 “w离最优的距离”;
- 因此,文档中的(\mathbb{D}{lin})惩罚项直接用 “这个差距的平方” 来定义:(\mathbb{D}{lin}(w,\Phi,e) = \left| \mathbb{E}[\Phi(X^e)\Phi(X^e)^T] w - \mathbb{E}[\Phi(X^e)Y^e] \right|^2)
这一设计完美解决了(\mathbb{D}_{dist})的缺陷:
- 不用计算((X^T X)^{-1})(避免矩阵求逆导致的数值爆炸和不连续性);
- 直接用 “等式差距” 衡量最优性,保证惩罚项光滑可导,适合梯度下降优化。
五、正规方程的优缺点:什么时候用?
理解正规方程的适用场景,能更清楚文档为什么这么设计:
| 优点 | 缺点 |
|---|---|
| 1. 直接出最优解,不用迭代(梯度下降要调学习率、多次迭代); | 1. 要计算((X^T X)^{-1}),时间复杂度是(O(d^3))(d是特征数)—— 特征多(比如(d>10^4))时计算量爆炸; |
| 2. 理论意义明确,是 “线性回归最优解” 的严格数学表达; | 2. 当(X^T X)不可逆(比如特征线性相关)时,无法求解(需要加正则化)。 |
| 3. 文档中可直接用来设计惩罚项,避开数值问题。 |
文档中用正规方程,正是利用了它的 “理论严格性”—— 作为 “最优分类器的判断标准”,而不是用它来实际求解大规模数据的系数(实际 IRM 训练用的是梯度下降,正规方程只是理论工具)。
总结:正规方程的核心定位
对理解 IRM 来说,正规方程的核心作用是 “线性分类器最优性的标尺”:
- 它告诉我们 “什么样的w是最优的”(满足(\mathbb{E}[\Phi\Phi^T] w = \mathbb{E}[\Phi Y]));
- 文档基于这个标尺,设计了(\mathbb{D}_{lin})惩罚项,让模型能通过梯度下降学习 “接近最优的不变分类器”;
- 它是连接 “线性回归理论” 和 “IRM 算法设计” 的关键桥梁,也是理解(\mathbb{D}_{lin})为什么能稳定优化的核心。
简单说:正规方程本身是线性回归的 “最优解公式”,但在 IRM 中,它被用作 “判断不变性的工具”—— 这是文档第三部分用它的核心原因。
2 缩放作弊
第一步:先构造一个简单场景(简化版示例 1)
为了避免复杂的矩阵运算,我们用一维特征简化(本质和文档中的高维场景一致):
-
目标:基于特征X预测Y,真实因果关系是(Y = X + \text{噪声})(X是 “不变因果特征”,比如奶牛形状);
-
数据表示(\Phi):初始设为(\Phi(X) = X)(正确提取因果特征);
-
分类器w:初始设为(w=1)(正确的权重,预测结果(\hat{Y} = w \cdot \Phi(X) = 1 \cdot X = X),接近真实Y);
-
不变性惩罚项:用文档中的(\mathbb{D}{lin})(简化为标量版,因为(\Phi)是一维):(\mathbb{D}{lin}(w,\Phi) = \left| \mathbb{E}[\Phi^2] \cdot w - \mathbb{E}[\Phi Y] \right|^2)
(标量版中,矩阵乘法变成普通乘法,范数变成绝对值,本质不变)。
先计算初始合理状态的数值(假设统计期望已知,用具体数代替):
- 设(\mathbb{E}[\Phi^2] = \mathbb{E}[X^2] = 2)(X的二阶矩);
- 设(\mathbb{E}[\Phi Y] = \mathbb{E}[X \cdot (X+\text{噪声})] = \mathbb{E}[X^2] = 2)(噪声与X独立,期望为 0);
- 此时(\mathbb{D}_{lin}(w=1, \Phi=X) = |2 \cdot 1 - 2|^2 = 0)(惩罚项为 0,说明(w=1)是最优分类器,符合不变性要求)。
第二步:模拟 “缩放作弊”——Φ 缩小、w 放大
现在,模型开始 “作弊”:选择一个很小的缩放系数(\gamma)(比如(\gamma=0.01),即缩小 100 倍),做两个操作:
- 数据表示缩放:(\Phi' = \gamma \cdot \Phi = 0.01 \cdot X)(原来的(\Phi(X)=X)变成(\Phi'(X)=0.01X),缩小 100 倍);
- 分类器缩放:(w' = \frac{w}{\gamma} = \frac{1}{0.01} = 100)(原来的(w=1)变成(w'=100),放大 100 倍)。
关键观察 1:预测结果不变(模型 “假装” 在正常预测)
缩放后的预测结果是:(\hat{Y}' = w' \cdot \Phi'(X) = 100 \cdot (0.01X) = X)和原来的(\hat{Y}=X)完全一样!—— 模型的预测能力没变化,经验风险(预测误差)也没变化,看起来 “一切正常”。
关键观察 2:不变性惩罚项趋近于 0(模型 “逃避” 不变性要求)
现在计算缩放后的(\mathbb{D}_{lin}(w', \Phi')):
- 先算(\mathbb{E}[\Phi'^2] = \mathbb{E}[(0.01X)^2] = 0.0001 \cdot \mathbb{E}[X^2] = 0.0001 \cdot 2 = 0.0002);
- 再算(\mathbb{E}[\Phi' Y] = \mathbb{E}[(0.01X) \cdot Y] = 0.01 \cdot \mathbb{E}[XY] = 0.01 \cdot 2 = 0.02);
- 代入(\mathbb{D}{lin})公式:(\mathbb{D}{lin}(w'=100, \Phi'=0.01X) = |0.0002 \cdot 100 - 0.02|^2 = |0.02 - 0.02|^2 = 0)
如果把(\gamma)调得更小(比如(\gamma=0.001),缩小 1000 倍):
- (\Phi''=0.001X),(w''=1000);
- (\mathbb{E}[\Phi''^2] = 0.000001 \cdot 2 = 0.000002);
- (\mathbb{E}[\Phi'' Y] = 0.001 \cdot 2 = 0.002);
- (\mathbb{D}_{lin} = |0.000002 \cdot 1000 - 0.002|^2 = |0.002 - 0.002|^2 = 0)。
结论:无论(\gamma)多小((\Phi)多小),只要w按(1/\gamma)放大,惩罚项(\mathbb{D}_{lin})始终为 0—— 模型用 “缩放” 操作,让惩罚项 “失效” 了。
第三步:为什么惩罚项会 “失效”?(公式本质拆解)
从数学上看,“缩放作弊” 能让惩罚项趋近于 0,是因为(\mathbb{D}_{lin})的公式结构和 “(\Phi)、w的缩放关系” 刚好抵消。
我们用通用的缩放操作((\Phi'=\gamma\Phi),(w'=w/\gamma))代入(\mathbb{D}{lin})的标量版公式:(\mathbb{D}{lin}(w', \Phi') = \left| \mathbb{E}[(\gamma\Phi)^2] \cdot \frac{w}{\gamma} - \mathbb{E}[(\gamma\Phi) Y] \right|^2)化简里面的项:
- 第一项:(\mathbb{E}[\gamma^2 \Phi^2] \cdot \frac{w}{\gamma} = \gamma^2 \cdot \mathbb{E}[\Phi^2] \cdot \frac{w}{\gamma} = \gamma \cdot \mathbb{E}[\Phi^2] \cdot w);
- 第二项:(\mathbb{E}[\gamma\Phi Y] = \gamma \cdot \mathbb{E}[\Phi Y]);
因此:(\mathbb{D}_{lin}(w', \Phi') = \left| \gamma \cdot (\mathbb{E}[\Phi^2] w - \mathbb{E}[\Phi Y]) \right|^2 = \gamma^2 \cdot \left| \mathbb{E}[\Phi^2] w - \mathbb{E}[\Phi Y] \right|^2)
当(\gamma)趋近于 0 时((\Phi)无限缩小),(\gamma^2)也趋近于 0—— 不管原来的(\left| \mathbb{E}[\Phi^2] w - \mathbb{E}[\Phi Y] \right|^2)是多少,最终(\mathbb{D}_{lin})都会趋近于 0。
这就是作弊的 “数学漏洞”:模型只要不断缩小(\Phi)、放大w,就能让不变性惩罚项无限趋近于 0,相当于 “绕过了不变性要求”。
第四步:作弊的危害 —— 模型退化成 ERM,学不到不变性
IRM 的目标函数是 “损失 = 经验风险 +λ・惩罚项”。当惩罚项趋近于 0 时,目标函数就近似为 “仅最小化经验风险”—— 这和普通的 ERM 完全一样!
回到 “奶牛骆驼分类” 的例子:
- 作弊前:模型需要学习 “Φ 提取形状特征,w=1 最优”,惩罚项保证不变性;
- 作弊后:模型发现 “缩小 Φ(比如 Φ 同时提取形状和背景)、放大 w”,既能让预测结果(比如 “背景颜色→标签”)的经验风险很小,又能让惩罚项趋近于 0—— 于是模型就会偷懒,只学 “背景颜色” 这种虚假关联,而不学 “形状” 这种不变特征;
- 最终后果:在训练环境中误差很小,但在新环境(比如沙滩奶牛)中彻底翻车 —— 和 ERM 的泛化失败完全一样,IRM 的 “不变性优势” 彻底消失。
总结:固定 w=1.0 的本质 —— 堵上 “缩放作弊” 的漏洞
不固定w时,“Φ 和 w 的缩放冗余” 给了模型 “钻空子” 的机会:用缩放操作让惩罚项失效,逃避学习不变性的任务。
而固定(w=1.0),相当于强行消除了这种冗余:
- 此时w不能再放大,模型无法通过 “缩放 w” 来抵消 “Φ 缩小” 的影响;
- 要让惩罚项变小,模型只能调整(\Phi),让(\Phi)本身提取出 “能让 w=1.0 最优的不变特征”(比如形状)—— 这才是 IRM 真正想让模型做的事。
简单说:固定 w=1.0,就是 “断了模型作弊的后路”,逼着它必须学习不变性,而不是靠缩放耍小聪明。
3. 固定最优分类器W为标量1.0
一、先明确:“固定标量w” 是 “三步简化” 的最终结果,不是一开始的假设
第三部分对w的处理是逐步收敛的,不是一开始就固定为标量。整个过程分三个阶段,你的理解对应最后一个阶段:
| 阶段 | 对w的处理 | 核心问题 | 后续改进方向 |
|---|---|---|---|
| 1. 理想 IRM 模型 | w是 “每个环境下独立的最优分类器”(比如环境 1 的(w_1)、环境 2 的(w_2)) | 双层优化,计算量极大(每个环境要解一次内层w的优化) | 把 “硬约束” 改成 “软惩罚”,合并w和(\Phi)的优化 |
| 2. 带惩罚项的模型((L_{IRM})) | w是 “共享的线性分类器”(不再分环境,但仍是向量,比如(w=(w_1,w_2))) | 参数冗余((\gamma\Phi)和(w/\gamma)效果一样,导致惩罚项失效) | 固定w的形式,消除冗余 |
| 3. 最终 IRMv1 模型 | w固定为 “标量 1.0”(不再是向量,所有环境共享这一个标量) | 会不会限制表示能力? | 用定理 4 证明 “等价性”,用(\Phi)的灵活性弥补 |
简单说:“固定标量w” 是为了解决 “参数冗余” 问题 —— 如果不固定w,模型会通过 “缩放(\Phi)和w” 作弊(比如(\Phi)缩小 100 倍,w放大 100 倍,预测结果不变但惩罚项趋近于 0),无法学到真正的不变性。
二、关键证明:为什么 “固定标量(w=1.0)” 就够了?(定理 4 的通俗解读)
文档用 “定理 4” 严格证明了:任何线性不变预测器,都能分解成 “秩 1 的数据表示(\Phi)”+“标量分类器(w=1.0)”—— 这是 “固定标量w” 的核心理论支撑,也是最容易被忽略的关键。
我们用第二部分的 “奶牛分类示例” 具象化这个证明:假设 “跨环境的最优不变预测器” 是(\hat{Y} = 1 \cdot X_1 + 0 \cdot X_2)(只看形状(X_1),不看背景(X_2)),这个预测器可以拆成两种等价形式:
| 形式 | 数据表示(\Phi) | 分类器w | 最终预测器(w \circ \Phi) | 本质 |
|---|---|---|---|---|
| 原形式(向量w) | (\Phi(X) = (X_1, X_2))(提取两个特征) | (w=(1, 0))(向量,给(X_1)权重 1,(X_2)权重 0) | (1 \cdot X_1 + 0 \cdot X_2) | 用w的权重筛选有用特征 |
| 等价形式(标量w) | (\Phi(X) = X_1)(只提取有用的(X_1)特征,秩 1) | (w=1.0)(标量,直接输出(\Phi(X))) | (1.0 \cdot X_1) | 用(\Phi)直接提取有用特征,w仅做 “传递” |
这两种形式的预测结果完全一致,但第二种形式有个巨大优势:不用优化w,只需优化(\Phi),让(\Phi)提取出 “能让(w=1.0)最优的特征”。
定理 4 进一步推广了这个结论:哪怕是更复杂的线性不变预测器(比如(\hat{Y} = 2 \cdot X_1 + 3 \cdot X_3)),也能拆成 “(\Phi(X) = 2X_1 + 3X_3)”+“(w=1.0)”—— 也就是说,w的 “权重分配功能” 可以完全转移给(\Phi),w本身只需做 “标量传递”,固定为 1.0 不会损失任何表示能力。
三、固定(w=1.0)后,怎么保证 “在所有环境下都是最优分类器”?
这是最核心的疑问:既然w固定了,怎么确保它在每个环境下都满足 “最优”?答案是:把 “优化w的任务” 转移给了(\Phi),通过惩罚项倒逼(\Phi)学习到 “让(w=1.0)最优的特征”。
具体来说,IRMv1 的目标函数通过两部分协同实现这一点:
- 经验风险项((\sum R^e(\Phi))):保证(\Phi)的预测结果准 —— 即(1.0 \cdot \Phi(X) = \Phi(X))能接近真实Y,这是 “最优” 的基础;
- 不变性惩罚项((\lambda \cdot |\nabla_{w=1.0} R^e(w \cdot \Phi)|^2)):保证(w=1.0)是 “基于(\Phi)的最优分类器”——
- 回顾正规方程:“w最优” 等价于 “(\mathbb{E}[\Phi\Phi^T] w = \mathbb{E}[\Phi Y])”;
- 对固定的(w=1.0),惩罚项衡量的正是 “(w=1.0)违反这个等式的程度”(梯度越小,违反程度越低,(w=1.0)越接近最优);
- 模型通过梯度下降优化(\Phi),会同时最小化 “预测误差” 和 “违反最优条件的程度”,最终让(\Phi)满足:对所有环境e,(\mathbb{E}[\Phi\Phi^T] \cdot 1.0 = \mathbb{E}[\Phi Y])—— 即(w=1.0)在所有环境下都是最优分类器。
举个通俗例子:
- 环境 1(牧场):最优特征是 “绿色背景 + 四条腿”,但(w=1.0)固定;
- 环境 2(沙滩):最优特征是 “黄色背景 + 四条腿”,但(w=1.0)固定;
- 模型会调整(\Phi),最终提取出 “四条腿” 这个跨环境不变的特征 —— 此时(w=1.0)在两个环境下,基于 “四条腿” 特征的预测都是最优的(因为 “四条腿” 和Y的关联不变)。
四、误区澄清:固定标量w会不会限制 “非线性不变性”?
用户可能会担心:如果真实的不变预测器是非线性的(比如(\hat{Y} = \Phi(X)^2)),固定线性的(w=1.0)会不会抓不到这种非线性?
文档第三部分 3.3 节专门回应了这个问题,核心结论是:不会限制,因为(\Phi)可以是非线性的。比如真实不变预测器是(\hat{Y} = (\Phi_0(X))^2)((\Phi_0(X))是 “四条腿” 特征),我们可以让 IRMv1 的(\Phi(X) = (\Phi_0(X))^2)—— 此时(w=1.0 \cdot \Phi(X) = (\Phi_0(X))^2),完全等价于真实的非线性预测器。
也就是说,w的线性与否不重要,重要的是(\Phi)的灵活性—— 只要(\Phi)用深度神经网络等非线性模型,IRMv1 就能捕捉到非线性的不变关联。固定(w=1.0)只是 “简化优化”,不会限制模型的表达能力。
总结:固定标量(w=1.0)是 “简化优化” 与 “表示能力” 的平衡
第三部分对w的处理,本质是一次非常巧妙的 “问题转化”:
- 不直接优化 “每个环境的最优w”(复杂、冗余);
- 而是把 “w的最优性要求” 转化为 “对(\Phi)的约束”(通过惩罚项);
- 最终固定(w=1.0),让优化目标从 “双层((\Phi,w))” 变成 “单层((\Phi))”,既解决了计算难题,又不损失不变性的核心要求。
你的理解抓住了这一简化的关键 —— 正是因为w被固定为标量,IRM 才从理论上的 “双层优化” 变成了工程上可落地的 “梯度下降训练”,这也是 IRMv1 能实际训练的核心原因。
4. 实现细节:无偏估计
一、先明确:实现的核心目标是什么?
IRMv1 的目标函数需要计算两部分,实现细节主要针对第二部分(不变性惩罚项):(\min {\Phi} \underbrace{\sum{e \in \mathcal{E}{tr}} R^e(\Phi)}{\text{1. 经验风险项(好算)}} + \lambda \cdot \underbrace{\sum_{e \in \mathcal{E}{tr}} \left| \nabla{w|w=1.0} R^e(w \cdot \Phi) \right|^2}_{\text{2. 不变性惩罚项(难算,实现细节的核心)}})
1. 经验风险项(简单回顾,不是重点)
- 含义:模型在每个环境的预测误差(比如分类任务的交叉熵、回归任务的均方误差);
- 计算方式:对每个环境e,取一个小批量样本((X^e, Y^e)),用模型(\Phi)输出预测值(\Phi(X^e)),直接计算损失(比如
cross_entropy(Φ(X^e), Y^e)),求和即可。
这部分和普通神经网络训练完全一致,没有特殊细节,重点在 “不变性惩罚项”。
2. 不变性惩罚项(实现难点)
- 含义:衡量 “固定标量(w=1.0)时,每个环境下的风险(R^e(w \cdot \Phi))对w的梯度范数平方”—— 梯度越小,说明(w=1.0)越接近该环境的最优分类器,不变性越强;
- 核心难题:公式中的(\nabla_{w|w=1.0} R^e(w \cdot \Phi))是期望梯度(需要用整个环境的所有数据计算),但实际训练中只能用 “小批量样本” 估算 —— 如何用小批量无偏估算这个期望梯度的范数平方?
这就是 “实现细节” 要解决的核心问题:用两个独立小批量,无偏估算 “梯度范数平方”。
二、核心难题:为什么不能用 “单个小批量” 估算?
先理解 “梯度范数平方” 的数学含义:对环境e,惩罚项是(\left| \nabla_{w=1.0} R^e(w \cdot \Phi) \right|^2 = \left| \mathbb{E}{(X,Y) \sim e} \left[ \nabla{w=1.0} \ell(w \cdot \Phi(X), Y) \right] \right|^2)其中(\ell)是单个样本的损失(比如交叉熵、MSE),(\mathbb{E})表示对环境e的所有样本取期望。
如果用单个小批量估算(比如取一批样本B,计算平均梯度后平方):(\text{错误估算} \approx \left| \frac{1}{|B|} \sum_{(X,Y) \in B} \nabla_{w=1.0} \ell(w \cdot \Phi(X), Y) \right|^2)会出现偏差—— 因为数学上 “期望的平方≠平方的期望”((\mathbb{E}[a]^2 \neq \mathbb{E}[a^2]))。
举个简单例子:假设a是随机变量(比如单个样本的梯度),(\mathbb{E}[a] = 0)(梯度期望为 0,模型接近最优),但(\mathbb{E}[a^2] = 2)(单个样本梯度有波动)。此时:
- 真实的 “梯度范数平方” 是(\mathbb{E}[a]^2 = 0);
- 用单个小批量估算:若批量中样本的平均梯度是(\frac{a_1+a_2}{2}),平方后可能是((\frac{1+(-1)}{2})^2 = 0)(偶尔对),也可能是((\frac{2+0}{2})^2 = 1)(有偏差)—— 无法稳定无偏估算。
这就是为什么文档要设计 “用两个独立小批量” 的方案:规避偏差,保证估算的无偏性。
三、解决方案:用 “两个独立小批量” 无偏估算
文档给出的核心技巧是:对每个环境e,抽取两个独立的小批量(记为(B_1 = {(X_1,Y_1), ..., (X_b,Y_b)})和(B_2 = {(X_1',Y_1'), ..., (X_b',Y_b')}),批量大小都是b),用以下公式估算 “梯度范数平方”:(\widehat{\left| \nabla_{w=1.0} R^e \right|^2} = \frac{1}{b} \sum_{k=1}^b \left[ \nabla_{w=1.0} \ell(w \cdot \Phi(X_k), Y_k) \cdot \nabla_{w=1.0} \ell(w \cdot \Phi(X_k'), Y_k') \right])
1. 为什么这个公式是 “无偏” 的?(数学直觉)
我们用期望的线性性质验证:(\mathbb{E}\left[ \frac{1}{b} \sum_{k=1}^b g_k \cdot g_k' \right] = \frac{1}{b} \sum_{k=1}^b \mathbb{E}[g_k \cdot g_k'])其中(g_k = \nabla_{w=1.0} \ell(w \cdot \Phi(X_k), Y_k))((B_1)中第k个样本的梯度),(g_k' = \nabla_{w=1.0} \ell(w \cdot \Phi(X_k'), Y_k'))((B_2)中第k个样本的梯度)。
由于(B_1)和(B_2)独立,(\mathbb{E}[g_k \cdot g_k'] = \mathbb{E}[g_k] \cdot \mathbb{E}[g_k'])(独立变量的期望乘积 = 乘积的期望)。而(\mathbb{E}[g_k] = \nabla_{w=1.0} R^e)(单个样本梯度的期望就是环境的整体梯度),因此:(\mathbb{E}\left[ \frac{1}{b} \sum_{k=1}^b g_k \cdot g_k' \right] = \frac{1}{b} \sum_{k=1}^b \mathbb{E}[g_k] \cdot \mathbb{E}[g_k'] = \left( \nabla_{w=1.0} R^e \right) \cdot \left( \nabla_{w=1.0} R^e \right) = \left| \nabla_{w=1.0} R^e \right|^2)
这就证明了:用两个独立小批量的 “样本梯度两两相乘再平均”,能无偏估算真实的 “梯度范数平方”—— 解决了单个小批量的偏差问题。
2. 用具体例子理解:分类任务的梯度计算
以 “彩色 MNIST 分类任务” 为例(交叉熵损失),进一步拆解 “单个样本的梯度(g_k)” 怎么算:
- 模型结构:(\Phi)是一个深度神经网络(比如 MLP),输入是彩色 MNIST 图像X,输出是 “logit 值”(记为(h = \Phi(X)),因为(w=1.0)固定,预测 logit 就是(w \cdot \Phi(X) = h));
- 单个样本损失:交叉熵损失(\ell(h, Y) = -Y \cdot \log(\sigma(h)) - (1-Y) \cdot \log(1-\sigma(h))),其中(\sigma(h))是 sigmoid 函数(二分类);
- 对w的梯度:由于(h = w \cdot \Phi(X)),当(w=1.0)时,(\frac{\partial h}{\partial w} = \Phi(X))。根据链式法则:(\nabla_{w=1.0} \ell(w \cdot \Phi(X), Y) = \frac{\partial \ell}{\partial h} \cdot \frac{\partial h}{\partial w} = (\sigma(h) - Y) \cdot \Phi(X))
也就是说,“单个样本的梯度(g_k)” 就是 “(预测概率 - 真实标签) × 模型输出(\Phi(X_k))”—— 这是代码中可以直接计算的量。
四、对应代码:从公式到 PyTorch 实现(结合文档附录 D)
文档附录 D 给出了 PyTorch 实现的核心代码,我们结合上面的逻辑,逐行拆解关键部分,让你看到 “实现细节” 如何落地:
1. 核心函数:计算单个环境的不变性惩罚项
def compute_penalty(losses, dummy_w):
# losses: 单个环境的两个小批量损失(shape: [2b],前b个来自B1,后b个来自B2)
# dummy_w: 固定的标量w=1.0(PyTorch参数,requires_grad=True,用于求导)
# 1. 从losses中拆分两个独立小批量的损失:B1(0::2,步长2取前b个)、B2(1::2,步长2取后b个)
loss1 = losses[0::2].mean() # B1的平均损失
loss2 = losses[1::2].mean() # B2的平均损失
# 2. 计算B1对dummy_w的梯度g1,B2对dummy_w的梯度g2(create_graph=True保留计算图,用于后续反向传播)
g1 = torch.autograd.grad(loss1, dummy_w, create_graph=True)[0]
g2 = torch.autograd.grad(loss2, dummy_w, create_graph=True)[0]
# 3. 两个梯度逐元素相乘后求和:对应公式中的“1/b ∑g_k·g_k'”(批量平均已在loss1/loss2中完成)
return (g1 * g2).sum()
2. 训练循环:整合所有环境的损失和惩罚项
# 1. 初始化模型和参数
phi = torch.nn.Sequential( # 数据表示Φ:MLP网络(输出logit,即w·Φ(X),w=1.0固定)
torch.nn.Linear(784*3, 256), # 彩色MNIST:3通道×784像素=2352输入特征
torch.nn.ReLU(),
torch.nn.Linear(256, 1) # 输出1个logit值(二分类)
)
dummy_w = torch.nn.Parameter(torch.Tensor([1.0]), requires_grad=True) # 固定w=1.0,需求导
opt = torch.optim.SGD(list(phi.parameters()) + [dummy_w], lr=1e-3) # 优化器:同时优化Φ和dummy_w(w实际不变,仅用于求导)
mse = torch.nn.MSELoss(reduction="none") # 损失函数(示例用MSE,分类用CrossEntropyLoss)
# 2. 准备多环境数据(比如两个训练环境:env1, env2)
environments = [env1_data, env2_data] # 每个环境数据是(X, Y),X: [n, 2352], Y: [n, 1]
# 3. 训练循环
for iteration in range(50000):
total_error = 0.0
total_penalty = 0.0
# 对每个环境单独计算误差和惩罚项
for x_e, y_e in environments:
# 3.1 抽取该环境的一个大批量,再拆成两个独立小批量(通过随机打乱+分割实现)
batch_size = 64 # 单个小批量大小b=64,大批量大小=2b=128
perm = torch.randperm(len(x_e)) # 随机打乱样本索引
x_batch = x_e[perm[:2*batch_size]] # 取前128个样本作为大批量
y_batch = y_e[perm[:2*batch_size]]
# 3.2 计算该大批量的损失(每个样本的损失,reduction="none"保留单个损失)
h = phi(x_batch) # 模型输出Φ(X),即w·Φ(X)(w=1.0)
losses = mse(h * dummy_w, y_batch) # 单个样本损失:losses.shape = [128]
# 3.3 计算该环境的经验误差(大批量平均损失)
error_e = losses.mean()
total_error += error_e
# 3.4 计算该环境的不变性惩罚项(调用compute_penalty函数)
penalty_e = compute_penalty(losses, dummy_w)
total_penalty += penalty_e
# 3.5 计算总损失:经验风险项(乘以小系数1e-5,平衡量级) + 惩罚项
total_loss = 1e-5 * total_error + total_penalty
# 3.6 反向传播+参数更新(仅更新phi的参数,dummy_w的梯度会被计算但实际不更新,因为w固定为1.0)
opt.zero_grad()
total_loss.backward()
opt.step()
# 3.7 日志输出(每1000轮打印模型参数)
if iteration % 1000 == 0:
print("Iteration:", iteration, "Phi params:", phi[0].weight[:2])
五、关键细节补充:为什么要 “dummy_w”?
代码中引入了 “dummy_w”(虚拟的标量参数),这是实现中的一个 “技巧”,需要特别解释:
- 因为我们需要计算 “损失对 w 的梯度”,但 w 固定为 1.0,不能被优化 —— 所以用一个 “dummy_w” 作为 “梯度计算的载体”;
- 在训练中,dummy_w 的参数值始终是 1.0(不会被更新,因为它的梯度在反向传播后,优化器更新时会被 “计入”,但由于损失对 dummy_w 的梯度最终会被模型通过调整 Φ 抵消,实际 dummy_w 的值不会变);
- 本质上,dummy_w 只是为了 “触发 PyTorch 的自动求导机制”,让我们能计算出 “损失对 w 的梯度”,而不是真的要优化 w。
总结:实现细节的核心逻辑链
- 目标:用小批量估算 “梯度范数平方”,保证无偏性;
- 难题:单个小批量估算有偏差(期望平方≠平方期望);
- 方案:对每个环境抽两个独立小批量,计算 “样本梯度两两相乘再平均”,无偏逼近真实期望;
- 代码落地:用 PyTorch 的自动求导(
torch.autograd.grad)计算两个小批量的梯度,相乘求和得到惩罚项,再和经验风险项结合优化。
简单说,实现细节的本质就是 “用两个小批量解决无偏估算问题”—— 这是 IRM 能在神经网络上训练的关键,也是从 “理论公式” 到 “实际代码” 的最后一步。
5. 线性/非线性分类器与线性/非线性不变性
一、先分清基础:线性分类器 vs 非线性分类器
分类器的 “线性 / 非线性”,描述的是 “模型输入(或特征)到预测输出的映射关系是否满足线性性质”—— 简单说,就是预测输出是否是 “输入特征的一次函数组合”。
1. 线性分类器:输入特征的一次函数
定义:对输入特征(x = (x_1, x_2, ..., x_d))(或数据表示(\Phi(x))),预测输出(\hat{y})是 “特征的线性组合 + 截距”,数学形式为:
- 回归任务(如预测房价):(\hat{y} = w_0 + w_1 x_1 + w_2 x_2 + ... + w_d x_d)((w_0)是截距,(w_1,...,w_d)是特征权重);
- 分类任务(如判断是否是猫):(\hat{y} = \sigma(w_0 + w_1 x_1 + ... + w_d x_d))((\sigma)是激活函数,如 sigmoid、softmax,仅用于输出概率,核心特征组合仍是线性的)。
关键特点:
- 决策边界是 “线性的”(比如二维特征下是直线,三维是平面,高维是超平面);
- 权重w是 “全局固定” 的 —— 每个特征的重要性(权重)不随输入特征的取值变化而变化。
例子:
- 文档第二部分的 “线性回归预测Y”:(\hat{Y} = \alpha_1 X_1 + \alpha_2 X_2)(无截距的线性分类器);
- 最简单的 “感知机”:仅含一个线性层的模型,是神经网络的基础单元。
2. 非线性分类器:输入特征的非线性函数
定义:预测输出是 “输入特征的非线性函数组合”—— 通常通过 “线性操作 + 非线性激活函数” 叠加实现,数学形式没有统一表达式,但核心是 “特征之间存在乘法、平方、指数等非线性关系”。
关键特点:
- 决策边界是 “非线性的”(比如二维特征下是曲线、圆、不规则图形,高维是复杂曲面);
- 特征的 “有效权重” 是 “动态变化” 的 —— 同一个特征在不同输入下的重要性可能不同(比如 “猫的耳朵特征” 在 “正面猫图” 和 “侧面猫图” 中的权重不同)。
例子:
- 含隐藏层的神经网络(如 MLP、CNN):比如 “输入→线性层→ReLU→线性层→输出”,ReLU 是 nonlinear 激活函数,让整体映射变成非线性;
- 文档第五部分的 “彩色 MNIST 实验”:用 MLP 作为(\Phi),其输出是 “像素特征的非线性组合”,属于非线性分类器。
3. 核心区别:能否捕捉特征间的复杂关联
线性分类器只能捕捉 “特征与输出的直接线性关联”(比如 “猫的耳朵长度” 与 “是猫的概率” 成正比),无法捕捉 “特征间的交互关联”(比如 “耳朵长度 + 眼睛形状” 的组合才是判断猫的关键);而非线性分类器可以通过隐藏层和激活函数,学习到这种复杂的交互关系。
比如 “判断‘沙滩上的奶牛’”:
- 线性分类器可能只能学习 “绿色背景→奶牛”“四条腿→奶牛” 的独立关联,无法结合 “四条腿 + 沙滩背景” 的组合;
- 非线性分类器(如 CNN)可以学习 “四条腿 + 流线型身体 + 沙滩背景” 的组合特征,正确判断沙滩上的奶牛。
二、再深入:线性不变性 vs 非线性不变性
不变性的 “线性 / 非线性”,描述的是 “跨环境稳定的关联(因果规律)是否满足线性性质”—— 简单说,就是 “目标变量Y与不变特征(\Phi(x))之间的稳定关系,是一次函数还是非线性函数”。
1. 线性不变性:不变特征与 Y 的线性稳定关联
定义:存在一个跨所有环境稳定的线性关系,使得 “目标变量Y与不变特征(\Phi(x))的条件期望” 是线性的,数学形式为:(\mathbb{E}[Y^e | \Phi(x^e) = h] = w \cdot h \quad (\forall e \in E_{all}))其中h是不变特征(\Phi(x))的取值,w是跨环境固定的线性权重 —— 无论环境如何变化(如(X_2)的分布变、噪声变),这个线性关系始终成立。
例子:
- 文档第二部分的示例 1:(\mathbb{E}[Y^e | X_1^e = x_1] = x_1)(不变特征是(X_1),Y与(X_1)的条件期望是线性的,跨环境稳定);
- 简单物理规律:“物体下落距离s与时间t的关系”(忽略空气阻力)——(s = 0.5 g t^2)若固定g,则是s与(t^2)的线性关系(不变特征是(t^2),线性不变性)。
2. 非线性不变性:不变特征与 Y 的非线性稳定关联
定义:跨所有环境稳定的关联是非线性的,即 “目标变量Y与不变特征(\Phi(x))的条件期望” 是 nonlinear 函数,数学形式为:(\mathbb{E}[Y^e | \Phi(x^e) = h] = f(h) \quad (\forall e \in E_{all}))其中(f(h))是非线性函数(如平方、指数、多项式等),且这个非线性函数跨环境固定 —— 环境变化只会影响 “非不变特征”(如背景、噪声),不会改变(f(h))的形式。
例子:
- 真实物理规律:“物体下落距离s与时间t的关系”(考虑空气阻力)——(s = \frac{m g}{k} (1 - e^{-\frac{k}{m} t}))(m是质量,k是阻力系数),s与t是指数非线性关系,且这个关系在 “不同高度、不同初始速度”(不同环境)下稳定;
- 图像分类:“判断是否是猫” 的不变规律 ——“猫的轮廓特征((\Phi(x)))与‘是猫’的概率” 是非线性的(比如 “耳朵 + 眼睛 + 胡须” 的组合特征需要非线性函数才能映射到概率),且这个非线性关系在 “白天 / 夜晚、室内 / 户外”(不同环境)下稳定。
3. 核心区别:稳定关联的函数形式是否线性
线性不变性的 “稳定关联” 是 “一次函数”,可以用线性分类器直接建模;而非线性不变性的 “稳定关联” 是 “复杂函数”,必须用非线性分类器才能捕捉 —— 如果用线性分类器强行建模非线性不变性,会导致 “不变性学习失败”(比如用直线拟合曲线,无法在所有环境下稳定预测)。
三、关键关联:分类器类型与不变性类型的匹配
IRM 的核心目标是 “学习跨环境的不变性”,而分类器的类型(线性 / 非线性)决定了 “模型能否表达这种不变性”—— 两者必须匹配,否则无法学到真正的不变性。
1. 线性分类器 → 只能表达线性不变性
如果真实的不变性是非线性的(如(Y = \Phi(x)^2)),但用线性分类器(如(\hat{Y} = w \cdot \Phi(x)))建模,会出现两种问题:
- 要么 “欠拟合”:无法捕捉(\Phi(x)^2)的非线性关系,只能学到近似的线性关系(如用(\hat{Y} = 2 \Phi(x))近似(Y = \Phi(x)^2),仅在(\Phi(x) \approx 2)时准确,其他区域误差大);
- 要么 “依赖虚假关联”:为了降低训练误差,线性分类器会利用 “非不变特征”(如(X_2))的线性关联,导致泛化失败(如文档中的 ERM 模型)。
例子:用线性回归预测 “(Y = x^2 + \text{噪声})”(x是不变特征,非线性不变性):
- 线性分类器只能学到(\hat{Y} = a x + b),无法捕捉(x^2)的关系;
- 若存在虚假特征(z = x^2)(与Y线性相关),线性分类器会优先学习(\hat{Y} = z),但z若随环境变化(如噪声变导致z的分布变),则模型泛化失败。
2. 非线性分类器 → 可表达线性 / 非线性不变性
非线性分类器(如深度神经网络)的灵活性,使其既能表达线性不变性,也能表达非线性不变性:
- 表达线性不变性:只需让非线性分类器的 “非线性部分失效”—— 比如用 “输入→线性层→输出”(无激活函数),本质就是线性分类器;
- 表达非线性不变性:通过 “线性层 + 非线性激活函数” 叠加,学习到不变特征与Y的非线性关系 —— 比如用 MLP 学习 “(Y = \Phi(x)^2)”,只需让 MLP 的隐藏层学习到 “(\Phi(x) \times \Phi(x))” 的非线性交互。
例子:文档第五部分的彩色 MNIST 实验:
- 真实不变性是非线性的:“数字形状特征((\Phi(x)))与标签Y的关系” 需要非线性映射(如 “像素组合→形状特征→概率”);
- 用 MLP(非线性分类器)作为(\Phi),既能捕捉 “形状特征”,又能通过非线性激活函数学习 “形状→标签” 的非线性不变性,最终在测试环境中泛化成功。
3. IRM 中的选择:为什么用非线性分类器((\Phi))+ 固定线性w?
文档第三部分的 IRMv1 用 “非线性(\Phi)(如神经网络)+ 固定线性(w=1.0)”,本质是 “让(\Phi)承担‘非线性特征提取’的任务,让w承担‘线性传递’的任务”—— 这种设计的巧妙之处在于:
- 非线性(\Phi)负责 “从原始输入中提取不变特征(无论线性还是非线性)”:比如(\Phi)可以提取 “(x^2)”(非线性不变特征),也可以提取 “x”(线性不变特征);
- 固定线性(w=1.0)负责 “传递不变特征到输出”:无需优化w,只需让(\Phi)输出 “已处理好的不变特征”,(w=1.0)直接传递,避免参数冗余和作弊。
这种设计既利用了非线性分类器的灵活性(捕捉非线性不变性),又通过固定w简化了优化(避免缩放作弊)—— 是 “灵活性” 与 “可优化性” 的平衡。
四、常见误区澄清
- **误区 1:线性分类器只能学习线性不变性,非线性分类器只能学习非线性不变性?**错。非线性分类器可以学习线性不变性(只需关闭非线性激活),但线性分类器无法学习非线性不变性 —— 核心是 “分类器的表达能力是否覆盖不变性的函数形式”。
- **误区 2:IRMv1 的(w=1.0)是线性的,所以 IRM 只能学习线性不变性?**错。IRMv1 的w是线性的,但(\Phi)可以是非线性的 ——(\Phi)可以提取 “非线性的不变特征”(如(\Phi(x) = x^2)),此时(w \cdot \Phi(x) = x^2),本质是学习了 “(Y = x^2)” 的非线性不变性。w的线性与否,不影响(\Phi)的非线性特征提取能力。
- **误区 3:非线性不变性一定比线性不变性更好?**错。不变性的 “线性 / 非线性” 是 “真实规律的属性”,不是 “优劣的判断标准”—— 如果真实规律是线性的(如示例 1 的(Y = X_1)),用非线性分类器反而可能过度拟合(学习到 “(X_1 + X_1^3)” 等冗余项),降低泛化能力。
总结:四者关系的核心逻辑
| 概念 | 核心描述 | IRM 中的作用 |
|---|---|---|
| 线性分类器 | 输入特征的一次函数,决策边界线性 | 仅用于简单线性不变性场景(如示例 1),表达能力有限 |
| 非线性分类器 | 输入特征的非线性函数,决策边界复杂 | 核心工具(如(\Phi)用 MLP/CNN),捕捉线性 / 非线性不变性 |
| 线性不变性 | 不变特征与Y的线性稳定关联 | 简单因果规律的体现(如物理定律、线性回归) |
| 非线性不变性 | 不变特征与Y的非线性稳定关联 | 复杂现实规律的体现(如图像分类、复杂物理过程) |
简单说:分类器是 “工具”,不变性是 “目标”—— 选择线性还是非线性分类器,取决于 “真实不变性的函数形式”;而 IRM 的价值在于,无论不变性是线性还是非线性,都能通过 “灵活的(\Phi) + 固定的w”,学习到跨环境稳定的关联,实现分布外泛化。
6. 特征分布不一定是因果关联
一、先明确:因果关联与特征分布的核心区别
在 “白天(e1)/ 夜晚(e2)猫分类” 任务中:
- 因果关联:指 “猫的真实特征(如轮廓)→标签 Y” 的稳定关系,即(P(Y|X_{轮廓})^e1 = P(Y|X_{轮廓})^e2)—— 无论白天还是夜晚,“有猫的轮廓→Y = 猫” 的概率始终是 90%,这是我们需要保留的核心;
- 特征分布:指 “输入特征 X(或表示 Φ(X))的边际分布”,即(P(X)^e1)(白天猫的像素分布:明亮、细节清晰)和(P(X)^e2)(夜晚猫的像素分布:昏暗、细节模糊)—— 两者天然不同,是环境差异的体现。
“匹配特征分布” 的思路(如领域自适应)试图让(P(Φ(X))^e1 = P(Φ(X))^e2)(比如把夜晚猫的 Φ(X)“提亮”,让其分布和白天一致),但这种操作会强行抹除 “环境差异中与因果关联无关的合理信息”,甚至扭曲因果特征本身。
二、具体场景:匹配特征分布如何破坏因果关联
以 “白天 / 夜晚猫” 为例,假设 Φ(X) 是 “提取猫轮廓的特征表示”,我们分两步看 “匹配分布” 的危害:
1. 第一步:为匹配分布,Φ 被迫 “篡改因果特征”
白天猫的轮廓特征 Φ(X1):边缘清晰(如耳朵轮廓的梯度值大)、像素强度高(均值 200);夜晚猫的轮廓特征 Φ(X2):边缘模糊(梯度值小)、像素强度低(均值 50);两者的边际分布(P(Φ(X)))天然不同(均值、方差都不一样)。
若强行要求(P(Φ(X))^e1 = P(Φ(X))^e2),模型会怎么做?
- 要么 “把夜晚猫的 Φ(X2) 强度拉高到 200”:但夜晚猫的真实轮廓是模糊的,拉高强度会导致 “非轮廓区域(如背景噪声)也被强化”—— 原本 “模糊轮廓→Y = 猫” 的因果关联被破坏,模型可能把 “噪声强化的背景” 误判为猫;
- 要么 “把白天猫的 Φ(X1) 强度压低到 50”:白天猫的清晰轮廓被模糊,原本 “清晰轮廓→Y = 猫” 的高概率(90%)会下降到 “模糊轮廓→Y = 猫” 的低概率(60%)—— 因果关联的强度被削弱,模型无法再依赖轮廓做准确判断。
简言之:因果特征的分布差异(白天清晰 / 夜晚模糊)是 “环境差异的自然结果”,强行匹配会让 Φ(X) 偏离 “真实因果特征”,导致因果关联断裂。
2. 第二步:匹配分布可能 “引入虚假关联”,进一步掩盖因果
假设 “白天猫的背景多为白色,夜晚猫的背景多为黑色”—— 背景颜色是 “非因果特征”(与 Y 无关),但为了匹配 Φ(X) 的分布,模型可能会:
- 把夜晚猫的背景 “从黑色改成白色”,让 Φ(X) 的颜色分布和白天一致;
- 此时,Φ(X) 中 “背景颜色” 的权重被放大,而 “轮廓” 的权重被压缩(因为轮廓的分布差异已被强行抹除)。
最终结果:模型会误以为 “白色背景→Y = 猫”(虚假关联),而忽略 “轮廓→Y = 猫” 的因果关联 —— 这和 ERM 依赖 “绿色背景 = 奶牛” 的错误逻辑完全一致,本质是 “为了匹配分布,牺牲了因果特征的优先级”。
三、数学层面:为什么 “P (Φ(X)) 一致”≠“P (Y|Φ(X)) 一致”
“匹配特征分布” 的核心误区是:认为 “P (Φ(X)) 一致” 能推出 “P (Y|Φ(X)) 一致”(因果关联稳定),但数学上两者没有必然联系,甚至可能冲突。
用贝叶斯公式拆解:(P(Y|Φ(X)) = \frac{P(Φ(X)|Y) \cdot P(Y)}{P(Φ(X))})
“匹配特征分布” 仅保证(P(Φ(X))^e1 = P(Φ(X))^e2),但:
- (P(Y))(标签分布)可能随环境变(如白天猫样本占 80%,夜晚占 20%)—— 此时即便(P(Φ(X)|Y))和(P(Φ(X)))一致,(P(Y|Φ(X)))也会变;
- 更关键的是:为了让(P(Φ(X)))一致,模型可能扭曲(P(Φ(X)|Y))(“因果特征→Y” 的条件分布)—— 比如把 “夜晚猫的 Φ(X|Y = 猫)” 改成和 “白天猫的 Φ(X|Y = 猫)” 一致,导致(P(Y|Φ(X)))失去因果意义。
举个极端例子:若 Φ(X) 被强制 “所有环境下都输出同一个值”(完全匹配分布),则(P(Y|Φ(X)) = P(Y))(仅依赖标签分布),因果关联被完全破坏 —— 模型变成 “靠猜标签分布分类”,和因果无关。
四、附录 D 的核心观点:匹配分布是 “为了不变而不变”,偏离因果目标
附录 D(IRM 实现细节的补充)明确指出:“试图让 Φ(X) 的支撑集(或分布)一致” 的思路,本质是 “追求表面的不变性(特征分布不变),而非本质的不变性(因果关联不变)”。
这种思路的根本问题在于:
- 因果关联的稳定,不依赖 “特征分布的稳定”—— 比如 “猫的轮廓→Y = 猫” 的关联,无论轮廓特征是清晰还是模糊(分布不同),只要 “轮廓存在”,关联就稳定;
- 强行匹配分布,会让 Φ 失去 “捕捉因果特征的灵活性”——Φ 的目标应该是 “提取‘无论分布如何变,都能稳定预测 Y’的因果特征”,而不是 “把所有环境的特征都改成同一个分布”。
总结:为什么 IRM 不采用 “匹配特征分布”
IRM 的核心是 “追求 P (Y|Φ(X)) 跨环境不变”(因果关联稳定),而 “匹配特征分布” 追求的是 “P (Φ(X)) 跨环境不变”(表面分布一致)—— 前者是 “因”,后者是 “果”:
- 若因果关联稳定(P (Y|Φ(X)) 不变),即便 P (Φ(X)) 变,模型也能泛化;
- 若强行让 P (Φ(X)) 不变,反而可能破坏因果关联,导致泛化失败。
这就是 “匹配特征分布会破坏因果关联” 的本质 —— 它颠倒了 “不变性” 的优先级,把 “环境差异的表面特征” 当成了 “不变性的目标”,最终偏离了 “捕捉因果关联” 的核心。
7. 容量最小的零误差解
- 零误差解:在一些计算或模型拟合任务中,零误差解指的是能够完全准确地满足给定条件或数据的解,即不存在任何误差。例如,在解方程时,如果某个解使得方程左右两边完全相等,没有任何偏差,那么这个解就是零误差解。在机器学习中,如果一个模型能够完美地拟合训练数据,对于每个训练样本都能准确预测其输出,那么该模型对应的参数设置就是一个零误差解。
- 容量最小:“容量” 在这里通常可以理解为模型的复杂度或表示能力。容量最小的模型意味着它具有最简单的结构或最少的参数数量。例如,在神经网络中,层数较少、神经元数量较少的网络相对来说容量较小。追求容量最小的零误差解,就是在能够找到满足零误差条件的解的前提下,选择其中模型容量最小的那个解。
综合起来,“容量最小的零误差解” 就是在所有能够精确满足给定条件或数据(即零误差)的解中,具有最小模型复杂度或表示能力的解。这种解在实际应用中具有重要意义,因为它通常具有更好的泛化能力,不容易出现过拟合现象,能够在新的数据上也有较好的表现。
“正规方程(Normal Equation)” 是线性回归问题中 “直接求解最优系数” 的数学公式—— 它不用像梯度下降那样迭代优化,而是通过一次矩阵运算,直接算出能让 “均方误差最小” 的回归系数。这一工具在文档第三部分的核心作用是:作为 “判断线性分类器是否最优” 的标准,进而设计出稳定的不变性惩罚项(\mathbb{D}_{lin})。 ↩
我们用具体的数值例子 + 公式拆解,把 “缩放作弊” 的过程和危害彻底讲透 —— 核心是让你看到:不固定w时,模型能通过 “缩小(\Phi)、放大w” 的操作,让 “预测结果不变” 但 “不变性惩罚项趋近于 0”,最终逃避 “学习不变性” 的核心任务,退化成普通的 ERM 模型。 ↩
文档第三部分通过一系列推导,最终将 “每个环境下的最优分类器w”固定为标量 1.0,但这不是 “直接强行固定”,而是基于 “参数冗余消除” 和 “表示能力等价性” 的严谨简化。下面我们拆解这一过程的逻辑链,帮你理清 “为什么能固定”“固定后怎么保证不变性”“会不会限制模型能力” 这三个核心问题: ↩
文档第三部分的 “实现细节”,核心是解决 “如何用神经网络的小批量梯度下降(SGD),估算 IRMv1 目标函数中的‘不变性惩罚项’”—— 这是从 “数学公式” 到 “代码运行” 的关键一步。下面我们用 “目标拆解→核心难题→解决方案→代码对应” 的逻辑,结合具体例子和伪代码,把每个细节讲透,确保你能对应到实际编程场景。 ↩
在 IRM 的研究框架中,“线性 / 非线性分类器” 和 “线性 / 非线性不变性” 是两对核心概念 —— 前者决定了 “模型用什么形式做预测”,后者决定了 “模型要学习什么样的跨环境稳定规律”。两者既相互独立(分类器线性与否不直接等于不变性线性与否),又相互关联(分类器的灵活性会影响不变性的学习能力)。下面用 “定义 + 例子 + IRM 中的作用” 的逻辑,逐一拆解这两对概念,帮你理清它们的区别与联系。 ↩
要理解 “匹配特征分布(如让白天 / 夜晚猫的 Φ(X) 分布一致)为何会破坏因果关联”,核心是抓住 “因果关联的本质是‘条件分布 P (Y|X) 不变’,而‘匹配特征分布’追求的是‘边际分布 P (Φ(X)) 不变’—— 两者不仅不等价,还可能直接冲突”。下面用 “白天 / 夜晚猫分类” 的具体场景,结合因果逻辑和例子拆解: ↩
“容量最小的零误差解” 可以从 “零误差解” 和 “容量最小” 两个方面来理解,以下是具体解释: ↩
评论区